สร้างชีวิต สร้างความรู้สึก สร้างจิตใจ
สร้างจิตใจลงไปให้ตัวหุ่นยนต์สุนัข
ให้สามารถโต้ตอบกับเราได้
โดยใช้ไมโครคอนโทรลเลอร์มาควบคุม
จากนิตยสาร Hobby Electronics ปีที่ 11 ฉบับที่ 125 พ.ย. 2545
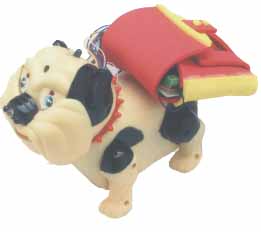
สวัสดีครับ โครงงานในฉบับนี้ผมได้แนวคิดมาจากการเดินท่องเที่ยวแถวๆร้านของเล่นเด็กๆซึ่งก็ได้พบปะกับหุ่นยนต์สุนัขตัวหนึ่งซึ่งผมได้ซื้อมาใช้
ทดลองในงานอิเล็กทรอนิกส์ทันทีและเมื่อได้ทดลองการเล่นหุ่นยนต์ตัวนี้ได้เกิดแนวคิดที่จะนำระบบเจ้าตัวประมวลผลทางคอมพิวเตอร์
หรือเรียกว่าตัไมโครคอนโทรลเลอร์ที่พึ่งศึกษามาหมาด ๆ มาใช้งานในบทความนี้ได้ทันท่วงทีเลยครับ
หลักการทำงานของกลไกหุ่นยนต์แบบเดิม ๆ
ในส่วนกลไกของหุ่นยนต์ผมจะขออธิบายโดยคราว ๆ เป็นหลักการ ส่วนเนื้อหาหลัก ๆ ขอให้ท่านผู้อ่านลองเดินหาซื้อแถว ๆ ร้านของเล่นและทดลองใส่ถ่านเพิ่มพลังให้กับตัวหุ่นยนต์ตัวนี้เองครับ หลักการโดยย่อคือ เมื่อเราซื้อเจ้าตัวนี้มาจากร้าน แล้วก็ทำทดสอบการทำงานของกลไกว่าก่อนที่เราจะทำการดัดแปลงนั้นมีการทำงานอย่างไรบ้าง สุนัขตัวนี้จะใช้ถ่านขนาด 4.5 โวลท์ กล่าวคือ เราจะใช้ถ่านที่มาขนาด AA จำนวนสามก้อน
ลักษณะการทำงานของเจ้าสุนัขตัวนี้จะเดินไปด้านหน้าและพอถึงจุด ๆ หนึ่งก็จะสั่นหัวอยู่ช่วงเวลาหนึ่ง และจะเดินหน้าต่อไปการทำงานเมื่อดูคร่าว ๆ แล้วเสมือนมีมอเตอร์อยู่จำนวนสองตัว แต่เมื่อเปิดดูแล้วผิดหวังครับเพราะใช้มอเตอร์เพียงแค่ตัวเดียวเท่านั้นและในส่วนของการสั่นหัวจะมีกลไกอีกชุดหนึ่งในการทำงาน แต่ไม่เป็นไรครับอย่างน้อย ๆ ก็ยังสามารถที่จะทำวงจรขับมอเตอร์ได้และเจ้าหุ่นยนต์สุนัขตัวนี้ยังมีของแถมมาคือ วงจรกำเนินสัญญาณเสียงซึ่งในวงจรนี้ เราจะนำมาใช้ประโยชน์ในการเกิดเสียงของหุ่นยนต์ที่เราจะทำการดัดแปลงกันต่อไปครับ
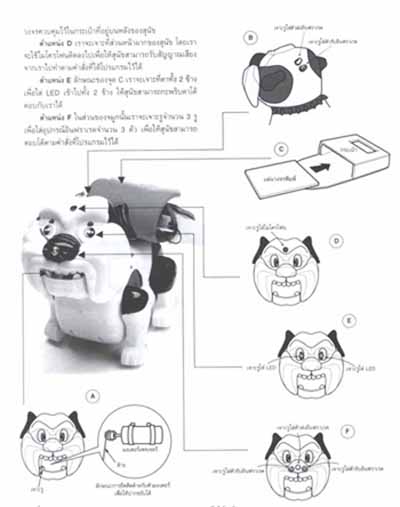
โครงสร้างและการดัดแปลงชิ้นส่วน
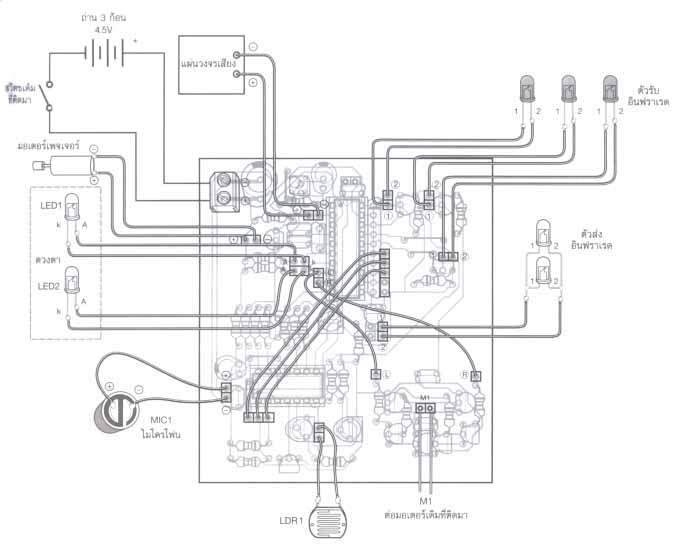
ตำแหน่ง A ในส่วนปาก เราจะเจาะรู 1 รู เพื่อสำหรับมัดติดกับด้ายเพื่อเชื่อมโยงไปสู่ส่วนที่เป็นมอเตอร์ เพื่อทำให้ปากสามารถขยับได้ตำแหน่ง B ในส่วนของจมูกนั้นเราจะเจาะรูจำนวน 3 รู เพื่อใส่อินฟาเรดจำนวน 3 ตัว เพื่อให้สุนัขสามารถตอบโต้ตามคำสั่งที่โปรแกรมไว้ได้ตำแหน่ง C ลักษณะของจุด C เราจะเจาะที่ตาทั้ง 2 ข้างเพื่อใส่ LED เข้าไปทั้ง 2 ข้างให้สุนัขสามารถกระพริบตาโต้ตอบกับเราได้ตำแหน่ง D ลักษณะการเจาะจะเจาะที่ส่วนหน้าพากของสุนัขโดยเราจะใช้ไมโครโฟนติดลงไปเพื่อให้สุนัขสามารถรับสัญญาณเสียงจากเราไปทำตามคำสั่งที่ได้โปรแกรมไว้ได้
ตำแหน่ง E เป็นจุดที่จะเจาะรูจำนวน 2 รู เพื่อติดอินฟาเรดทั้งตัวรับและส่งเพื่อให้สุนัขโต้ตอบกับเราได้เวลาเราลูบไปที่หัวของสุนัข
ตำแหน่ง F ในส่วนของจุด F ถือเป็นส่วนที่สำคัญที่สุด ถือเป็นหัวใจของสุนัขที่จะสร้างให้สุนัขตัวนี้มีชีวิตชีวา สามารถตอบโต้กับเราได้อย่างฉลาด ซึ่งเราจะติดตั้งในส่วนของวงจรไว้ในกระเป๋าที่อยู่บนหลังของสุนัข
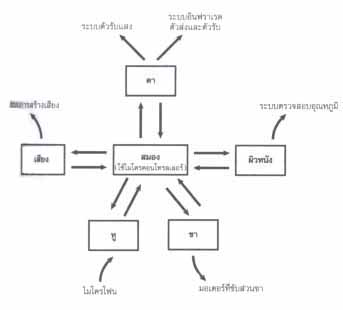
ระบบการทำงานหลักของสมอง
ในระบบการทำงานของสมอง เราจะใช้ตัวประมวลผลอะไรก็ได้แล้วแต่ที่เราจะถนัด ในที่นี้ผมขอหยิบตัวประมวลผลซึ่งเรียกว่าตัวไมโครคอนโทรลเลอร์ เบอร์ 89C2051 ซึ่งเรียกง่าย ๆ ว่าเป็นสมองพร้อมประสาทสัมผัสขนาดเล็ก ๆ ซึ่งก็เพียงพอกับระบบที่เราออกแบบซึ่งไมโครคอนโทรลเลอร์ตัวนี้ก่อนที่ผมจะนำมาทำงานก็เข้ารับการอบรมจากหนังสือที่บ้านอยู่ช่วงหนึ่ง จึงได้นำมาใช้งานได้ ซึ่งผมคิดว่าไม่น่าจะยากเกินกว่าที่นักอิเล็กทรอนิกส์อย่าง เรา ๆ จะทำการศึกษากันนะครับ
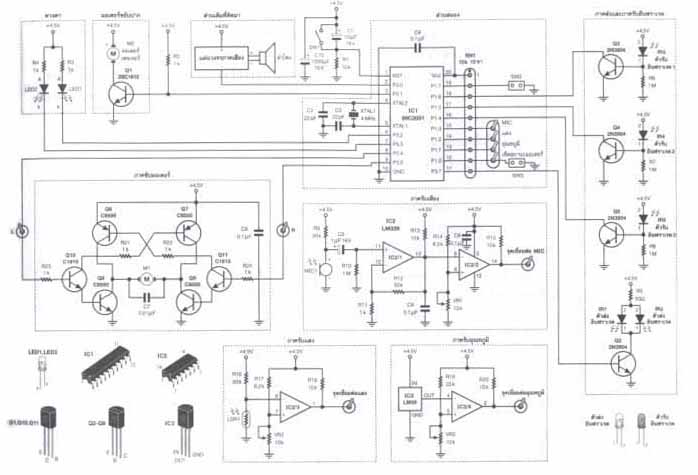
ในการทำงานช่วงแรก ๆ ผมขอให้ท่านผู้อ่านมองไมโครคอนโทรลเลอร์เบอร์นี้เป็นไอซีตัวหนึ่งเสียก่อนที่ได้รับการออกแบบมาให้ใช้กับงานต่าง ๆ ซึ่งไอซีเบอร์นี้จะมีการรับประสาทสัมผัสต่าง ๆ และสามารถสั่งงานออกทางการกระทำต่าง ๆ ได้ตามที่เราออกแบบไว้
ระบบที่เราได้ออกแบบต้องมีภาครับข้อมูลแและภาคแสดงผล ซึ่งการออกแบบต้องคำนึงถึงตัวของไอซีเบอร์ 89C2051 ด้วยว่าต้องการใช้งานอะไรเมื่ออยู่ในภาคแสดงผลและต้องการอะไรเมื่อได้รับข้อมูล ก่อนเข้าเรื่องจะขอกล่าวถึง ไอซีเบอร์นี้เสียก่อนคือ ไอซีเบอร์นี้จะอยู่ในตระกูลของ MCS51 เบอร์ที่ใช้นี้จะเป็นเบอร์ของบริษัท ATMEL โดยจะขึ้นต้นด้วย 89Cxxxx ซึ่งเบอร์ที่ใช้ในงานนี้คือ เบอร์ 89C2051 เป็นตัวขนาดเล็กมีขาเพียง 20 ขา สามารถใส่ข้อมูลหรือคำสั่งของเราได้ความยาว 2K Bytes มีหน่วยความาจำชั่วคราว 128 x 8 Bit สามารถขับ LED ได้ 15 หลอด หรือรับข้อมูลได้ 15 จุด
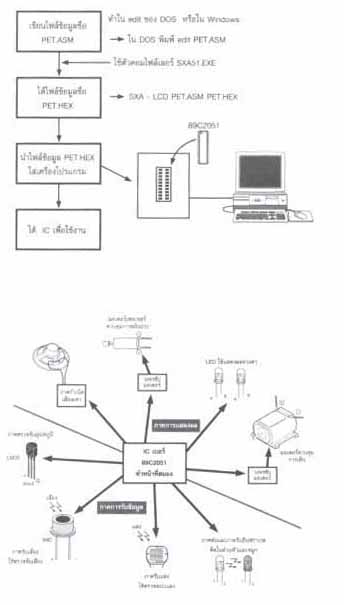
ซึ่งการเขียนข้อมูลลงไปใน ไอซี จะต้องมีคอมพิวเตอร์พร้อมตัวเขียนโปรแกรม เราสามารถหาซื้อตัวเขียนโปรแกรมได้จากร้านพัฒนา บอร์ดควบคุมต่าง ๆ ต่อจากนี้ผมจะขอนำเสนอ วิธีการโปรแกรมข้อมูลลงในไอซีดังนี้
หมายเหตุ : ส่วนของเครื่องโปรแกรมบางตัว เมื่อได้ไฟล์ข้อมูล PET.HEX แล้วยังไม่สามารถเขียนข้อมูลลงไปในตัวไอซีได้ต้องมีการแปลงเป็น PET.HX2 เสียก่อน โดยการใช้โปรแกรมการแปลง HEX2 HEX
ซึ่งในขั้นตอนการโปรแกรม ไอซีเบอร์นี้จะเป็นดังบล็อกไดอะแกรม จะได้ไอซีที่ใช้เฉพาะงานออกมา จำนวน 1 ตัว ซึ่งหมายถึงว่าเราต้องออกแบบวงจรสำหรับไอซีตัวนี้เรียบร้อยแล้วเสมือนกับว่า ต้องออกแบบระบบโครงสร้างของหุ่นยนต์เสร็จเรียบร้อยก่อนแล้ว จึงใส่สมองนั่นเอง
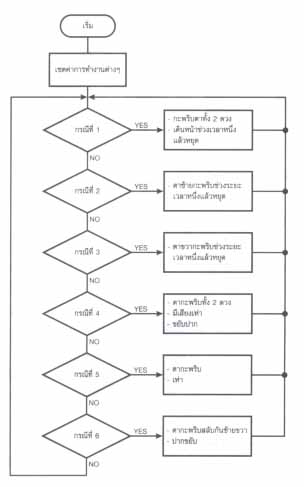
หลัการทำงานของวงจร
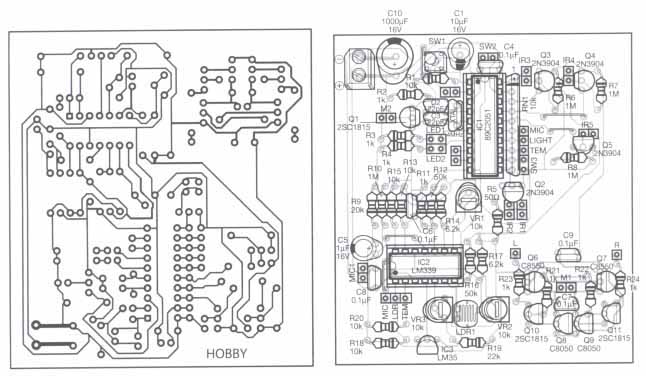
จากที่ผมได้กล่าวมาแล้ว วงจรต่าง ๆ ที่เราได้ออกแบบมานั้นจะถูกควบคุมโดยตัวไมโครคอนโทรลเลอร์ทั้งหมด ซึ่งผมขอกล่าวหลักการโดยย่อก่อนครับ โดยเริ่มจาก C1, R1 เป็นวงจรที่ใช้รีเซตตัว 89C2051 ขา 4 และขา 5 จะถูกต่อโดยใช้คริสตอล 4 MHZ และต่ออยู่กับ C2 และ C3 เพื่อเป็นฐานเวลาให้กับตัวไมโครคอนโทรลเลอร์ การต่อเพียงเท่านี้เราก็สามารถใช้งานไมโครคอนโทรลเลอร์ได้แล้วครับ ก็เหลือเพียงแต่ต่อเพิ่มวงจรทางด้านรับข้อมูล และแสดงผลเท่านั้น
ดูส่วนการรับข้อมูลจะเริ่มจาก ภาครับเสียง R9จะเป็นตัวต้านทานที่ต่อไฟเลี้ยงให้กับคอนเดนเซอร์ไมโครโฟน C5ทำหน้าที่ไม่ให้ไฟตรงผ่านเข้าสู่ตัวออปแอมป์ IC2/1 ให้ผ่านแต่สัญญาณเสียง R11 และ R12 เป็นตัวปรับอัตราขยายสัญญาณเสียงให้มีค่ามากขึ้น เข้าสู่ที่ขา 8 โดยมี R14และ VR1 เป็นตัวปรับแรงดันอ้างอิง
ดังนั้นสัญญาณเสียงที่ขา 8 จะถูกเปรียบเทียบกับขา 9 โดย IC2/2 ทำหน้าที่เป็นวงจรเปรียบเทียบแรงดัน ถ้ามีสัญญาณเสียงมากเกินจุดที่เราต้องการจะเกิดมีค่าแรงดันที่เอาท์พุท เป็นลอจิกต่ำ( 0 โวลท์) เพราะจะได้เข้ากันได้กับตัวคอนโทรลเลอร์ที่เราใช้นั่นเอง และ R15 เป็นความต้านทานที่ใช้ต่อ Pull up ให้กับ IC 2/2
ต่อมาเรามาดูที่ส่วนภาคตัวจับแสงกันบ้างครับ ในส่วนนี้ R16 จะเป็นตัวแบ่งแรงดันกับ LDR1 ซึ่งเป็นความต้านทานที่มีค่าเปลี่ยนแปลงตามแสงที่เข้ามา เข้าที่ขา6 ของ IC 2/3 โดยที่R17และ VR2 จะทำหน้าที่ปรับแรงดันอ้างอิงเข้าที่ขา 7 โดยถ้าเราต้องการตรวจจับแสงขนาดใด ก็ปรับที่ VR2 นั่นเอง และข้อมูลจะถูกเปรียบเทียบโดย IC2/3 เมื่อแสงมืดเกินจุดที่เราตั้งไว้ที่ ขา7 ที่ขา1 จะเกิดแรงดัน 0 โวลท์
ในส่วนของภาคตรวจจับอุณหภูมิในที่นี้ขอใช้เบอร์ LM35 ซึ่งจะให้แรงดันขึ้นกับอุณหภูมิคือ 10 มิลลิโวลท์ต่อ 1 องศาเซลเซียส ซึ่งจะทำงานตรวจจับอุณหภูมิได้รวดเร็ว แรงดันที่เกิดจากผลของอุณหภูมิจะเข้าที่ขา4 ของ IC2/4 และ R19,VR3 ทำหน้าที่เป็นตัวปรับแรงดันอ้างอิงเช่น เมื่อต้องการให้ตรวจจับอุณหภูมิที่35องศาเซลเซียส แรงดันที่ขาของ LM35 จะมีค่า 350 มิลลิโวลท์ เราสามารถปรับที่ VR3ให้มีค่า 350 มิลลิโวลท์ เพียงเท่านี้เมื่ออุณหภูมิมีค่าถึง 35 องศาเซลเซียส ก็จะได้แรงดันที่ขา2 ของ IC2 ที่เกิดจากการเปรียบเทียบแรงดันเป็น 0 โวลท์นั่นเองครับ
ต่อไปจะพิจารณาภาคขับมอเตอร์โดยมี TR6 TR7 TR8 TR9 TR10 TR11 ทำงานเป็นวงจรสวิตซ์ เพื่อสามารถให้มอเตอร์หมุนซ้าย หมุนขวาได้ตามค่าแรงดันที่เข้ามาเป็นลอจิก ที่จุด P1 และ P2 วงจรการทำงานอาจจะคุ้นเคยมาแล้ว นักอิเล็กทรอนิกส์ที่เคยโมดิฟายรถกระป๋อง ซึ่งอาจจะหาอ่านหลักการที่สมบูรณ์ได้จากหนังสือ HOBBY ELECTRONICSฉบับที่ 117 มกราคม 2545 ซึ่งเราจะควบคุมการทำงานของมอเตอร์จากขา P3.4 และP3.5 ของไมโครคอนโทรลเลอร์ เบอร์ 89C2051
ภาครับและภาคส่งอินฟาเรด จะเป็นการทำงานแบบง่าย ๆ อาศัยหลักการสะท้อนของแสงอินฟาเรด ซึ่งในที่นี้ได้ออกแบบให้ TR2 เป็นตัวเชื่อมต่อวงจรเมื่อได้รับแรงดันลอจิกจากขา P3.7 ในการเปิดปิด LED ส่งอินฟาเรด ซึ่งจะส่งแสงอินฟาเรดอ่อน ๆ เพราะเราต้องการให้มีการสัมผัสกับหุ่นยนต์ที่เราได้ออกแบบขึ้น
ในส่วนของภาครับโดยปกติที่ไม่ได้รับแสงจะมีลอจิกสูงเกิดขึ้นที่ขาคอเลคเตอร์ที่ TR3,TR4 และ TR5 ซึ่งจะถูกต่อเข้าที่ขา P1.7 , P1.6 และ P1.5 ตามลำดับ เมื่อภาครับตัวได ได้รับแสงอินฟาเรดจะทำให้ทานซิสเตอร์ในส่วนของภาครับนั้นทำงานและจะมีค่าข้อมูลเป็นลอจิกต่ำออกมาเพื่อให้ไมโครคอนโทรลเลอร์รับรู้
ภาคแสดงผลดวงตาของหุ่นยนต์ใช้ L1 และ L2ต่อเป็นลักษณะที่จะสว่างเมื่อที่ขา P3.2 และ P3.3 เป็น 0 โวลท์ และจะดับเมื่อขา P3.2 และ P3.3เป็น 4.5 โวลท์ โดยสามารถควบคุมการกระทำดังกล่าวจากตัวไมโครคอนโทรลเลอร์
และสุดท้ายเราจะใช้ส่วนของภาคกำเนิดเสียงที่มากับของเล่นชิ้นนี้มาทำงานโดยจะต่อไฟบวกเข้ากับขั่วบวกของแผ่นวงจรเสียง สังเกตจากค่าตัวเก็บประจุที่ต่อคร่อมบนแผ่นวงจรและขั้วลบจะต่อลงที่ขา P3.0 เมื่อ P3.0 เป็น4.5 โวลท์ ภาคผลิตเสียงนี้จะไม่ทำงาน และจะทำงานเมื่อขาP3.0 เป็น 0 โวลท์ เราจะใช้ขา P3.0 นี้เป็ฯตัวรับกระแส ซึ่งตัวไมโครคอนโทรลเลอร์นี้สามารถใช้ขา P3.0 นี้รับกระแสได้ประมาณ 20 มิลลิแอม ซึ่งก็เพียงพอสำหรับการแสดงผลภาคนี้
วิธีการเขียนโปรแกรมและโฟลชาร์ต
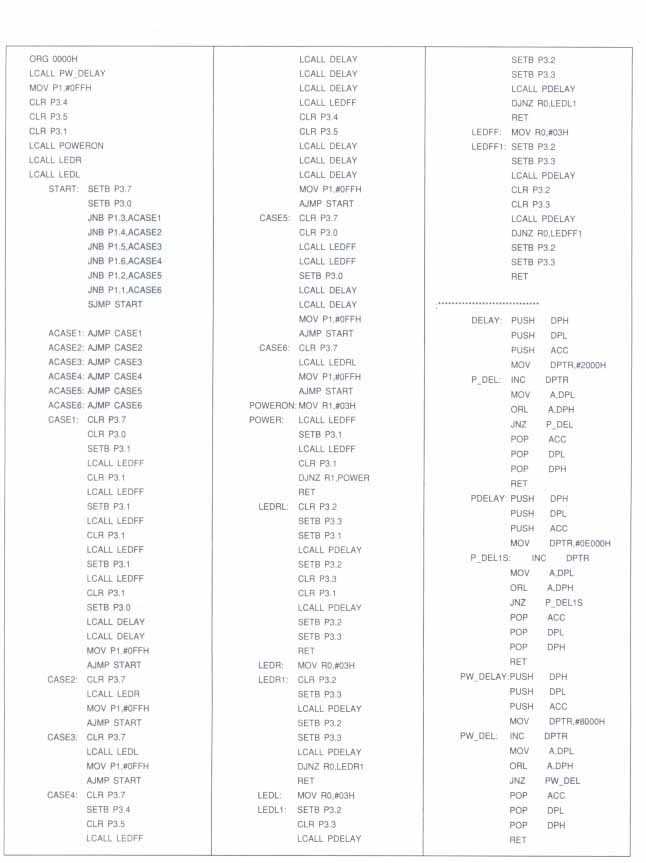
วิธีการเขียนโปรแกรม เราต้องกำหนดกรณีต่าง ๆ หรือสิ่งที่เราอยากจะให้เจ้าตัวหุ่นยนต์ของเราทำ ซึ่งในที่นี้จะกำหนดกรณีแบบง่าย ๆ ไม่ซับซ้อนดังนี้ครับ
กรณีที่ 1 เมื่อมีการลูบที่บริเวณหัว
– ตากระพริบทั้ง 2ดวง
– เดินหน้าช่วงระยะเวลาหนึ่งแล้วหยุด
กรณีที่ 2 เมื่อมีการลูบจมูกซ้าย
– ตาซ้ายกระพริบช่วงระยะเวลาหนึ่ง แล้วหยุด
กรณีที่ 3 เมื่อมีการลูบจมูกขวา
– ตาขวากระพริบช่วงระยะเวลาหนึ่ง แล้วหยุด
กรณีที่ 4 เมื่อได้ยินเสียง
– ตากระพริบทั้ง 2 ดวง
– มีเสียงเห่า
– ขยับปาก
กรณีที่ 5 เมื่อไม่ได้รับแสง
– ตากระพริบ
– เห่า
กรณีที่ 6 เมื่ออุณหภูมิสูงเกินที่กำหนด
– ตากระพริบสลับกัน ซ้ายขวา
– ปากขยับ
ซึ่งเมื่อเราทำได้ทั้ง 6 กรณีนี้แล้ว แสดงว่าอุปกรณ์ทุกตัวทำงานครบทุกตัว ดังนั้น เราสามารถนำสิ่งที่ได้มารวมกันแล้วตัดสินปัญหาต่าง ๆ เสมือนนำทุกอย่างมารวมกันแล้วสั่งการทำงาน ซึ่งถ้าอยากให้หุ่นยนต์ที่เราสร้างขึ้นมามีชีวิต เราก็ต้องพยายามฝึกเขียนโปรแกรมกันหน่อยก็แล้วกันนะครับ
ขั้นตอนการสร้างและทดสอบการทำงาน
เตรียมบอร์ดการทำงาน โดยการกัดปริ้นท์หาซื้ออุปกรณ์ตามที่มีในโครงงาน ทำการบัคกรีอุปกรณ์ต่าง ๆ ลงในบอร์ด และนำข้อมูลคำสั่งโปรแกรมลงบนไอซีเบอร์ 89C2051 และนำมาใส่บอร์ดทดลองนำถ่าน 3 ก้อนมาใส่ในรังถ่านภายใต้ท้องของหุ่นยนต์ เปิดสวิตซ์ ถ้าวงจรทำงานหุ่นยนต์ของเราจะต้องมีการกระพริบตาทั้ง 2 ดวงพร้อมกับมีการขยับปากช่วงระยะเวลาหนึ่ง และจะหยุดนิ่ง
ขั้นตอนการทดสอบต่อไปคือ นำนิ้วมือไปวางบนบริเวณจมูกที่เราติดตัวตรวจจับแสงแบบอินฟาเรดไว้ ขยับนิ้วมือซ้ายขวา จะต้องมีการกระพริบของดวงตาซ้ายและขวาตามที่ นิ้วมือเราขยับ เมื่อทดสอบแล้วทำงานแสดงว่างานที่เราทำเสร็จไปประมาณ 50 เปอร์เซ็นต์ ทำการทดสอบต่อ โดยใช้มือปิดแสงที่ตัว LDR จะต้องมีการกระพริบที่ตาทั้งสองดวง และมีเสียงเห่าเป็นระยะ ในวงจรนี้สามารถปรับ VR2 เพื่อเลือกความมืดของแสงตามที่เราต้องการ ทำการทดสอบวงจรทางเสียง โดย ใช้นิ้วมือดีดไปที่บริเวณไมโครโฟนที่ติดตั้งบริเวณหน้าพากของหุ่นยนต์ จะต้องมีไฟที่ตากระพริบมีเสียงเห่าและมีการขยับปากในวงจรส่วนนี้สามารถปรับ VR1 เพื่อเลือกระดับความดังของเสียงได้
ทำการทดสอบการทำงานของตัวตรวจจับอุณหภูมิโดยการใช้มัลติมิเตอร์วัดที่ขา 2 ของไอซี LM35 ดูเทียบกับเทอร์โมมิเตอร์จะได้ค่าเป็นแรงดันไฟฟ้าตามข้อมูลที่ได้กล่าวมาแล้วข้างต้น หรือใช้วิธีการปรับ VR3 ให้มีค่าสูงกว่าค่าแรงดันที่ขา 2 ของ LM 35 เล็กน้อย และใช้มือจับบริเวณไอซี อุณหภูมิในตัวเราจะทำให้ค่าแรงดันที่เกิดขึ้นที่ LM35 ค่ามากขึ้นกว่าค่าที่ตั้งไว้และจะเกิด ตากระพริบสลับซ้ายขวา และปากจะขยับไปจนกว่าอุณหภูมิจะลดลงกว่าจุดที่ตั้งไว้
ต่อไปเราจะมีการทดสอบจุดสุดท้ายคือ บริเวณส่วนหัว ทำการลูบหัวในส่วนที่มีตัวอินฟาเรดติดดอยู่ เมื่อลูบแล้วจะทำให้ตากระพริบทั้งสองดวงและจะเดินไปข้างหน้าช่วงระยะเวลาหนึ่ง เมื่อได้การทำงานดังนี้แล้วก็สรุปได้ว่าวงจรทำงานตามที่เราต้องการแล้วต่อไปจากนี้ ก็เขียนโปรแกรมเพื่อสร้างชีวิตให้กับเจ้าตัวหุ่นยนต์สุนัขได้ตามใจเราฝันเลยครับ
ข้อเสนอแนะ
ในการที่เราจะให้ไมโครคอนโทรลเลอร์เบอร์นี้ทำงานเป็นอินพุทตามหลักการจะต้องมีการทำให้ขาท ี่เราจะให้รับข้อมูลนั้นเป็นลอจิกสูงตามในวงจรเป็นคำสั่งที่สั่งให้พอร์ต P1ทั้งหมดมีค่าเป็นลอจิกสูงรอรับอินพุต พอร์ต P1จะทำหน้าที่เป็นอินพุต ดังนั้นจึงต้องใช้คำสั่ง MOV P1,#OFFH ในส่วนอุปกรณ์ต่อร่วมกับตัวไมโครคอนโทรลเลอร์นี้ จะต้องออกแบบให้มีการทำงานแล้วจะให้ลอจิกต่ำออกมา และเราจะใช้เจ้าตัวไมโครคอนโทรลเลอร์จับค่าลอจิกต่ำนั่นเอง เช่น JNB P1.3 , ส่วนที่เราต้องการไป คือรูปแบบคำสั่งคือ ให้กระโดดไปในโปรแกรมส่วนที่เราต้องการให้ไปทำงานเมื่อที่จุด P1.3 เป็นลอจิกต่ำส่วน VR1, VR2, VR3 สามารถปรับค่าได้ตามระดับที่เราต้องการ
ในส่วนของภาคอินพุตถ้าเราไม่ต้องการอ่านค่าตัวใดก็สามารถเขียนในโปรแกรมได้เลย เป็นข้อดีมากเมื่อเราต้องการให้มีการรับอินพุตก่อนหรือหลังเช่น ถ้าไม่ต้องการให้มีการรับอินพุตที่เป็นอุณหภูมิเราก็สามารถติดโปรแกรมส่วนที่เช็คอินพุตอุณหภูมิได้เลย ซึ่งจะไม่มีผลต่อระบบแต่อย่างใดครับ
คริสตอลที่ใช้จากข้อมูลของไอซีเบอร์ AT89C2051 สามารถทางานได้ที่ 0 HZ – 24 MHZ เราสามารถเลือกใช้คริสตอลค่าใด ๆ ก็ได้ ในที่นี้เลือกใช้ค่าที่ 4 MHZซึ่งจะได้ค่าใด ๆ ก็จะมีผลต่อความเร็วในการทำงานของตัวไมโครคอนโทรลเลอร์เองครับ
รายการอุปกรณ์
R1, R13, R15, R18, R20 -10 k 4 ตัว
R2 ,R3 ,R4 ,R11, R12, R22, R23, R24 – 1 k 8 ตัว
R5 – 50 1 ตัว
R6, R7, R8, R10 – 1M 4 ตัว
R9 20 k – 1 ตัว
R12 , R16 -50k 2 ตัว
R14 , R17 – 6.2 k 2 ตัว
R19 – 22 k 1 ตัว
R-NET 10 ขา – 10 k 1 ตัว
C1 10 uf/16 v 1 ตัว
C2 , C3 22 pf 2 ตัว
C4 , C6 , C7 ,C8 ,C9 0.1 uf 5 ตัว
VR1,VR2,VR3 10 (k?) 3 ตัว
ภาครับแสงอินฟาเรด 3 ตัว
ภาคส่งแสงอินฟาเรด 2 ตัว
LED 2 ตัว
SW1 1 ตัว
TR1 , TR10 , TR11 (2SC1815) 3 ตัว
TR2, TR3 ,TR4,TR5 (2N3904) 4 ตัว
TR6,TR7 (C8550) 2 ตัว
TR8,TR9 (C8050) 2 ตัว
IC LM35 1 ตัว
IC 89C2051 1 ตัว
IC LM339 1 ตัว
ซ็อกเกต 20 ขา 1 ตัว
ซ็อกเกต 14 ขา 1 ตัว
ไมโครโฟนแบบคอนเดนเซอร์ 1 ตัว
LDR 1 ตัว
แผ่นวงจรเสียง 1 แผ่น
มอเตอร์เพจเจอร์ 1 ตัว
มอเตอร์ดีซีพร้อมกลไก 1 ชุด
แผ่นวงจรพิมพ์ 1 ชุด
ตะกั่ว, สายไฟ,สว่าน,กาว
อื่น ๆ