จากล้อก้าวสู่การเดินด้วยกลไกแบบง่ายๆ เติมชีวิตด้วยวงจรอิเล็กทรอนิกส์แบบพื้นฐาน สร้างสรรค์ตามจินตนาการก้าวสู่โลกแห่งหุ่นยนต์

สวัสดีครับน้องๆ และผู้อ่านทุกท่าน โครงงานนี้เป็นอีกหนึ่งโครงงาน ที่ผมนำมอเตอร์ของบริษัท TAMIYA มาใช้งาน โดยผมได้นำแนวคิดการออกแบบโครงงาน Crocodile1 และ Crocodile2 มาจากหนังสือ Amphibionics Build Your Own Biologically Inspired Robot ผู้แต่ง Karl Williams หนังสือเล่มนี้จะเป็นการกล่าวถึงการสร้างหุ่นยนต์ที่เลียนแบบการทำงานของสัตว์ต่างๆ และมีโครงงานหลายๆ โครงงานที่น่าสนใจ หนึ่งในโครงงานต่างๆเหล่านั้น ผมก็ได้เลือกโครงงานเลียนแบบลักษณะการเดินของจระเข้ มาทำการดัดแปลง และสร้างสรรค์เป็นโครงงานให้น้องๆ ได้ทำในช่วงเวลาว่างๆ ครับ
ในโครงงานชุดนี้ ได้แบ่งย่อยๆ ออกเป็น 2 โครงงาน โดยในโครงงานแรกจะเป็นการใช้วงจรไฟฟ้าอย่างง่ายๆ เพื่อทำหน้าที่กลับขั้วมอเตอร์ โดยตัวหุ่นยนต์ Crocodile1 ที่เราได้สร้างขึ้นจะมีลักษณะการทำงานเพียงเดินหน้า และถอยหลังเท่านั้น ส่วนโครงงานที่สอง จะเพิ่มความฉลาดขึ้น โดยการเพิ่มเติมวงจรอิเล็กทรอนิกส์เข้าไป ซึ่งเป็นการเพิ่มความสามารถในการเคลื่อนที่มากยิ่งขึ้น ในรูปที่ 1ก. เป็นชุดมอเตอร์รุ่น Universal Gearbox ชุดมอเตอร์นี้ ผมได้ใช้ในการประกอบโครงสร้างของหุ่นยนต์ Crocodile1 การประกอบชุดทดเฟือง จะใช้การทดรอบที่มากที่สุด ในอัตราส่วน 719:1 ในรูปที่ 1ข. เป็นชุดมอเตอร์ที่ใช้การประกอบโครงสร้างหุ่นยนต์Crocodile2 ในการประกอบชุดมอเตอร์รุ่น Twin-Motor Gearbox นี้ จะประกอบในอัตราทด 203:1 และ ความพิเศษของชุดมอเตอร์นี้คือ สามารถขับเคลื่อนมอเตอร์พร้อมชุดเฟืองได้อย่างอิสระพร้อมกันทั้ง 2 ตัว

หุ่นยนต์ Crocodile1&Crocodile2 เคลื่อนที่ได้อย่างไร?
หุ่นยนต์ Crocodile1
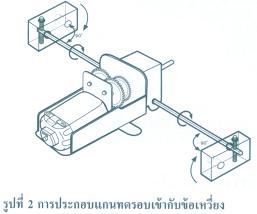
วิธีการเคลื่อนที่ของตัวหุ่นยนต์ Crocodile1 จะเป็นการเคลื่อนที่แบบง่ายๆ มีลักษณะการเคลื่อนที่ เดินหน้า และถอยหลัง เท่านั้น ภายในตัวหุ่นยนต์Crocodile1 สามารถเคลื่อนที่โดยอาศัย แหล่งพลังงานจากแบตเตอรี่ 4 ก้อน และมอเตอร์ทดรอบ 1 ตัว ในลักษณะของการเคลื่อนที่ แกนทดรอบจะถูกขับเคลื่อนเป็นวงกลม ผ่านข้อเหวี่ยง และส่งกำลังเข้าสู่กลไกส่วนขาเพื่อทำการเดิน
ในส่วนของข้อเหวี่ยง เราจะต้องประกอบทำมุมกับแกนทดรอบ 90 องศา โดยข้อเหวี่ยงทั้ง 2 อันนี้ จะต้องขนานกัน และกลับทางกันดังรูปที่ 2 เมื่อเริ่มทำงานมอเตอร์จะส่งกำลังผ่านทางข้อเหวี่ยง และส่งกำลังต่อไปสู่กลไกส่วนต่อไป เพื่อทำการเคลื่อนที่ดังรูปที่ 3
ในรูปที่ 3 แสดงลักษณะการก้าวเดินไปข้างหน้า ในขณะเริ่มการทำงานรูปที่ 3ก (จังหวะที่1) มอเตอร์ M1 เริ่มหมุนตามเข็มนาฬิกาขา L2 และขา L4 จะเริ่มขยับเข้าหากัน และในขณะเดียวกันขา L1 และขา L3 ก็จะขยับออกจากกัน รูปที่ 3ข (จังหวะที่2) ในขณะที่ขา L2 และขา L4 เริ่มขยับเข้ากัน จะทำให้ขา L1 ยกลอยขึ้น ในจังหวะนี้จะถือว่าเป็นจังหวะการเดินของตัวหุ่นยนต์ รูปที่ 3ค (จังหวะที่3) จะเป็นจังหวะที่วางขา L1 ลง และครบวงรอบการเดินของตัวหุ่นยนต์ ส่วนในการเดินถอยหลังจะมีลักษณะเช่นเดียวกับการเดินไปข้างหน้า แต่ต่างกันตรงที่มอเตอร์ M1 จะหมุนทวนเข็มนาฬิกา และขา L3 และ L4 จะเป็นขาก้าวเดินถอยหลังแทน

หุ่นยนต์ Crocodile2
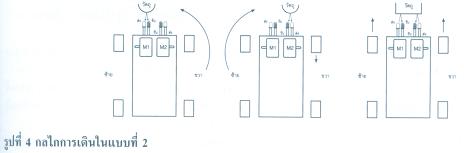
หุ่นยนต์ Crocodile2 จะมีลักษณะการเดินที่แตกต่างกับหุ่นยนต์ Crocodile1 ลักษณะการเดินจะใช้มอเตอร์ 2 ตัว ควบคุมการทำงานของขาทั้ง 2 ซีกอย่างอิสระ และการเคลื่อนที่ ขึ้นอยู่กับการตรวจจับของวงจรตรวจจับการเคลื่อนไหว (อินฟาเรด)
ในรูปที่ 4ก เมื่อวัตถุเคลื่อนที่เข้ามาในระยะตรวจจับด้านซ้าย ตัวหุ่นยนต์จะเคลื่อนที่ขาทางด้านขวาเข้าหาวัตถุทันที เช่นเดียวกันในรูปที่ 4ข เมื่อวัตถุเคลื่อนที่เข้าหาในระยะตรวจจับด้านขวา ขาทางด้านซ้ายก็จะเคลื่อนที่เข้าหาตัววัตถุในทันที และในรูปที่ 4ค เมื่อวัตถุเคลื่อนที่เข้ามาโดนตัวตรวจจับทั้งด้านซ้ายและด้านขวา ขาทั้ง 2 ข้างจะทำงานพร้อมกัน และเดินหน้าเข้าชนวัตถุนั้นทันที
การสร้างส่วนกลไก
โครงสร้างส่วนขา
โครงสร้างของส่วนขาหุ่นยนต์ Crocodile
1 และ Crocodile
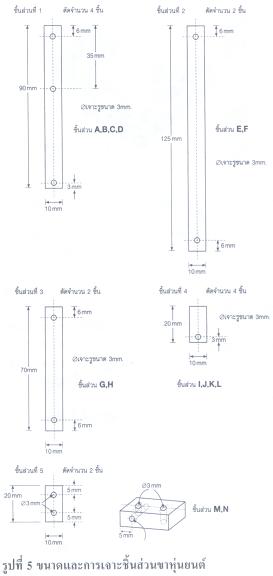
2 ผมได้เลือกใช้พลาสติกใสหนา 5 มิลลิเมตร ตัดเป็นเส้นๆ ความกว้าง 10 มิลลิเมตร นำมาแบ่งเป็นส่วนๆ และทำการใช้สว่านเจาะดังรูปที่ 5 ในการเจาะรูจะต้องมีการเตรียมดอกสว่านขนาด 3 มิลลิเมตร เพื่อใช้เจาะรูใส่แกนทดรอบ และดอกสว่านขนาด 2.5 มิลลิเมตร เพื่อใช้เจาะรูในการทำเกลียว
ชิ้นส่วนที่ 1 เป็นชิ้นส่วนที่ใช้ทำขาหน้าและขาหลัง ทำการตัดชิ้นส่วนและเจาะรูขนาด 3 มิลลิเมตร ให้ได้ขนาดตามรูปที่ 5 จำนวน 4 ชิ้น (A ,B ,C และ D)
ชิ้นส่วนที่ 2 เป็นชิ้นส่วนที่ทำหน้าที่เป็นส่วนประคองขาหน้าและขาหลัง ให้ยึดติดและเคลื่อนไหวสัมพันธ์กัน ขณะที่มีการเคลื่อนที่ ทำการตัดชิ้นส่วนนี้จำนวน 2 ชิ้น (E และ F)
ชิ้นส่วนที่ 3 เป็นชิ้นส่วนที่ทำหน้าที่ล็อกตำแหน่งขาหน้า ในขณะที่ข้อเหวี่ยงหมุน โดยในชิ้นส่วนที่ 3 จะทำการตัดจำนวน 2 ชิ้น (G และ H)
ชิ้นส่วนที่ 4 เป็นชิ้นส่วนที่ทำหน้าที่ เป็นส่วนเท้าของหุ่นยนต์ ทำการตัดชิ้นส่วนนี้จำนวน 4 ชิ้น (I ,J ,K และ L)
ชิ้นส่วนที่ 5 เป็นชิ้นส่วนที่สำคัญมาก และทำยากที่สุด เพราะในชิ้นส่วนนี้ถูกออกแบบให้ใช้งานเป็นข้อเหวี่ยง เพื่อทำการส่งกำลังจากแกนทดรอบ เข้าสู่ส่วนขาของหุ่นยนต์ทั้งหมด ในการเจาะรู นอกเหนือจากการเจาะรูขนาด 3 มิลลิเมตร เพื่อใช้ในการยึดส่วนข้อเหวี่ยงเข้ากับขาแล้ว ต้องมีการเจาะรูด้วยดอกสว่านขนาด 2.5 มิลลิเมตร เพื่อทำเกลียว ใช้ในการยึดแกนทดรอบกับชิ้นส่วนนี้
โครงสร้างส่วนลำตัว
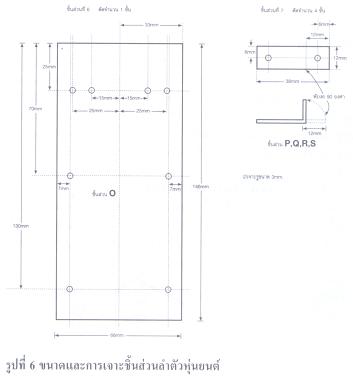
โครงสร้างของลำตัวหุ่นยนต์ ผมได้เลือกใช้พลาสติกใสหนา 3 มิลลิเมตร และทำการใช้สว่านเจาะดังรูปที่ 6 โดยในการเจาะรูจะใช้ดอกสว่านขนาด 3 มิลลิเมตร
ในชิ้นส่วนที่ 6 เป็นชิ้นส่วนที่ใช้ทำลำตัว(O) มีขนาดเป็นสี่เหลี่ยมผืนผ้า ยาว 146 มิลลิเมตร และกว้าง 66 มิลลิเมตร
ชิ้นส่วนที่ 7 เป็นชิ้นส่วนที่ใช้ยึดขากับลำตัวของหุ่นยนต์ ตัดจำนวน 4 ชิ้น (P ,Q ,R และ S) และในชิ้นส่วนนี้ จะต้องมีการดัดพลาสติกทำมุม 90 องศาดังรูปที่ 6
การประกอบโครงสร้างส่วนลำตัว
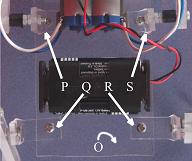
ในการประกอบโครงสร้างส่วนของลำตัว เราจะนำชิ้นส่วน P,Q,R และ S มาประกอบลงบนฐานลำตัว O และใช้น๊อตขนาดเส้นผ่านศูนย์กลาง 3 มิลลิเมตร ยาว 10 มิลลิเมตร จำนวน 4 ตัว ยึดชิ้นส่วนทั้งหมดเข้าด้วยกัน โดยแสดงการประกอบชิ้นส่วนทั้งหมดตามรูปที่7
การประกอบโครงสร้างส่วนขาเข้ากับลำตัว
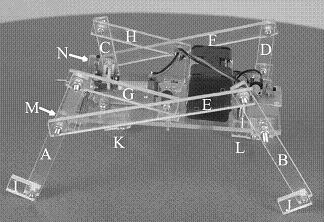
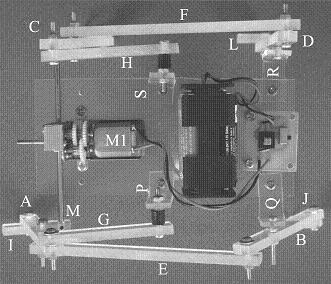
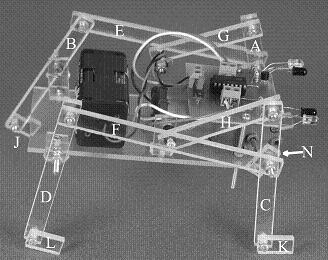
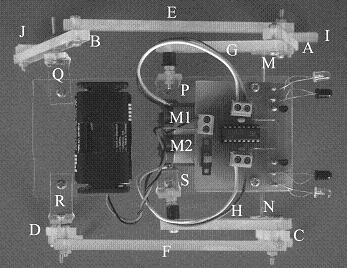
ในการประกอบโครงสร้างส่วนนี้ เราต้องให้ความละเอียดกันซักหน่อย โดยให้ประกอบส่วนต่างๆ เข้าด้วยกันดังรูปที่ 8 ในรูปที่ 8ก แสดงภาพการประกอบกลไกด้านข้างและด้านบนของตัวหุ่นยนต์ Crocodile
1 และในรูปที่ 8ข แสดงภาพการประกอบกลไกด้านข้างและด้านบนของตัวหุ่นยนต์ Crocodile
2 การประกอบกลไกในส่วนนี้ ขอให้ท่านผู้อ่านดูรูปที่ 8 เป็นหลัก โดยผมขอเริ่มจากการยึดมอเตอร์ที่ประกอบชุดทดรอบแล้วลงบนฐาน O หลังจากนั้นให้ทำการประกอบส่วนขาเข้าด้วยกัน และส่วนสุดท้ายทำการประกอบข้อเหวี่ยง (M และ N) เพื่อยึดแกนทดรอบ กับส่วนขา เมื่อเราทำการประกอบโครงสร้างทุกส่วนเข้าด้วยกันอย่างถูกต้องแล้ว ใช้แบตเตอรี่ 1.5 โวลท์ป้อนเข้าที่มอเตอร์ กลไกที่ถูกขับเคลื่อน จะต้องมีการเคลื่อนที่ไม่ติดขัด ขาทั้งซีกซ้ายและซีกขวา จะต้องมีการขยับเข้าออกสลับไปมา
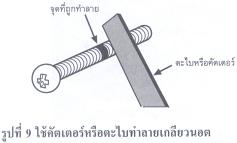
การทำลายแกนน๊อต
ในส่วนนี้ถ้าน้องๆ ประกอบตามรูปที่ 8 เสร็จแล้ว อาจจะเกิดข้อสงสัยว่าถ้าหุ่นยนต์ที่เราได้สร้างขึ้นมานั้น มีการทำงานหรือมีการเคลื่อนไหว น๊อตต่างๆที่เราใส่ยึดระหว่างจุดข้อต่อต่างๆ จะเป็นอย่างไรบ้าง คำตอบคือ น๊อตตามข้อต่อต่างๆ จะยึดแน่น หรือก็คลายตัวหลวมไปเลยครับ สาเหตุเกิดจาก ข้อต่อที่เราทำการยึดแต่ละส่วนเข้าด้วยกัน มีการเคลื่อนที่ไปมา วิธีการแก้ไขปัญหาเราต้องมีการทำลายเกลียวน๊อตบางส่วน โดยใช้คีมตัด ดังรูปที่ 9
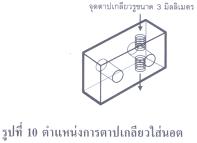
การสร้างส่วนยึดแกนทดรอบกับขาหุ่นยนต์
ในส่วนนี้เป็นส่วนที่สำคัญมาก (ส่วน M,N) เพราะเป็นส่วนที่ทำหน้าที่ยึดแกนทดรอบกับโครงสร้างของตัวหุ่นยนต์ สิ่งที่ต้องเตรียมลำดับต่อไป ภายหลังที่ทำการเจาะรูขนาด 2.5 มิลลิเมตรไปแล้ว คือการต๊าปเกลียวขนาด 3 มิลลิเมตรลงบนรูเจาะขนาด 2.5 มิลลิเมตร และใส่น๊อต 6 เหลี่ยม ยาว 3 มิลลิเมตร จำนวน 2 ตัวลงสู่เกลียวที่สร้างขึ้น เพื่อใช้ยึดกับแกนทดรอบ ดังรูปที่ 10
วงจรอิเล็กทรอนิกส์
ในการทำงานทั้งระบบ เมื่อเราสร้างส่วนกลไกเป็นที่เรียบร้อยแล้ว กลไกที่เราประกอบขึ้นมา ก็ยังไม่สามารถทำงานได้ เราต้องเพิ่มเติมส่วนทางอิเล็กทรอนิกส์เข้าไป เพื่อเป็นการเสริมสร้างการทำงานให้โครงงานของเราเสมือนมีชีวิตขึ้นมา ดังนั้นในส่วนนี้ผมจะค่อยๆ เริ่มจากการออกแบบวงจรอิเล็กทรอนิกส์แบบง่ายๆ จนถึงขั้นที่ยุ่งยาก เพื่อให้น้องๆได้เลือกใช้วงจร และเห็นพัฒนาการที่เกิดขึ้นกับตัวหุ่นยนต์ Crocodile1 และ Crocodile2
การออกแบบวงจรให้ตัวหุ่นยนต์เคลื่อนที่แบบเดินหน้าและถอยหลัง (Crocodile1)
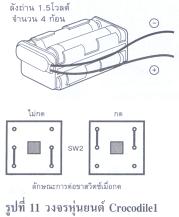
ในส่วนนี้เราได้สร้างวงจรแบบง่ายๆ โดยอาศัยการเดินหน้าหรือถอยหลัง โดยสามารถเลือกการทำงานเดินหน้า หรือถอยหลังจากการสลับสวิตช์เท่านั้นในรูปที่ 11 เป็นวงจรอิเล็กทรอนิกส์แบบง่ายๆ ทำหน้าที่ในการสลับขั้วมอเตอร์ เพื่อให้หุ่นยนต์ของเรามีการเดินหน้าและถอยหลัง สวิตช์ S1 ทำหน้าที่เปิดปิดกระแสไฟฟ้า ที่ผ่านเข้าสู่มอเตอร์ สวิตช์ S2 ทำหน้าที่สลับขั้วมอเตอร์ให้หมุนในทิศทางตามเข็มนาฬิกา หรือทวนเข็มนาฬิกา
การออกแบบวงจรให้ตัวหุ่นยนต์เคลื่อนที่เข้าหาวัตถุเมื่อมีวัตถุวิ่งเข้าหา (Crocodile2)
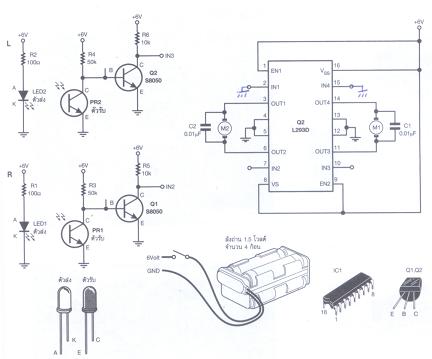
ในแนวทางการออกแบบวงจรนี้ อาศัยแนวความคิดการตรวจจับวัตถุ ที่วิ่งเข้าหาตัวหุ่นยนต์ เราต้องมีการใช้เซ็นเซอร์อินฟาเรด ในการทำหน้าที่เสมือนเป็นตาของหุ่นยนต์ และสั่งงานให้มอเตอร์มีการทำงานเมื่อมีวัตถุวิ่งเข้าชน ในระบบนี้เราต้องมีการใช้มอเตอร์รุ่น Twin-Motor Gearbox เพื่อให้การทำงานของมอเตอร์ทั้ง 2 ข้างมีการทำงานที่อิสระต่อกัน
หลักการทำงานของวงจร
วงจรจะมีลักษณะการทำงาน โดยอาศัยการตรวจจับแสงอินฟาเรด ในสภาวะปรกติวงจรภาครับแสงอินฟาเรดทั้งส่วน L และ R จะไม่ทำงาน ในสภาวะที่วงจรภาครับ L ได้รับสัญญาณการวิ่งเข้ามาของวัตถุ จะสั่งงานให้มอเตอร์ขวาทำงาน และตรงกันข้ามถ้าในสภาวะที่วงจรภาครับ R ได้รับสัญญาณการวิ่งเข้ามาของวัตถุ จะสั่งงานให้มอเตอร์ซ้ายทำงาน ในสภาวะสุดท้าย ถ้าวงจรภาครับ L และ R ได้รับสัญญาณของวัตถุเข้ามาพร้อมกัน มอเตอร์ทั้ง 2 ตัวก็ทำงานเดินหน้าพร้อมกัน
การประกอบวงจรเข้ากับลำตัวหุ่นยนต์
การประกอบบอร์ดเข้ากับลำตัวหุ่นยนต์ Crocodile1
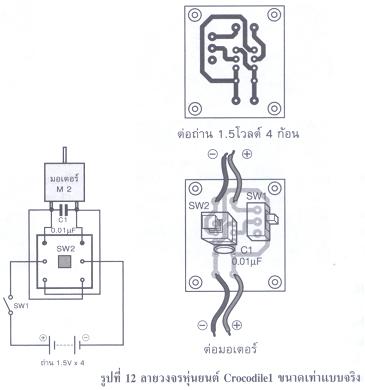
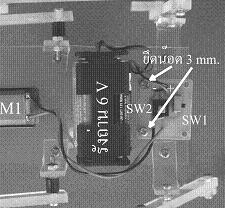
จากรูปที่ 15 ทำการยึดตัวบอร์ดเข้ากับลำตัวหุ่นยนต์ โดยการใช้น๊อตขนาด 3 มิลลิเมตร ในส่วนการติดตั้งรังถ่าน จะถูกยึดติดกับลำตัวหุ่นยนต์โดยเทปกาวสองหน้า จากนั้นทำการเดินสายไฟจากรังถ่านเข้าสู่บอร์ดที่จุด JMP1 และเดินสายไฟออกจากจุด MOTOR เพื่อเข้าสู่มอเตอร์ M1
การประกอบบอร์ดเข้ากับลำตัวหุ่นยนต์ Crocodile2
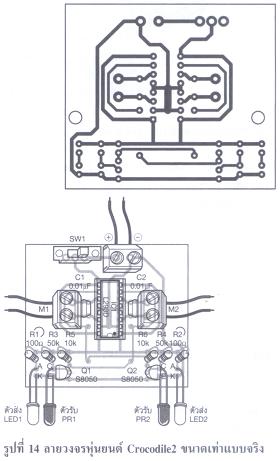
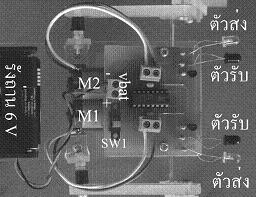
จากรูปที่ 16 ทำการใช้น๊อต 3 มิลลิเมตร 2 ตัว ยึดตัวบอร์ดเข้ากับลำตัวหุ่นยนต์ ทำการติดตั้งรังถ่าน 6 V เข้ากับลำตัวหุ่นยนต์โดยใช้เทปกาวสองหน้า หลังจากนั้น ทำการเชื่อมต่อไฟเข้ากับตัวบอร์ดที่ตำแหน่ง vbat (ตรวจสอบขั้วบวกและขั้วลบให้ถูกต้อง) และในส่วนสุดท้าย ทำการเดินสายไฟออกจากบอร์ดเพื่อเข้าสู่มอเตอร์จากจุด M1 และ M2


การทดสอบการทำงาน
ในโครงงานนี้ แบ่งการทดสอบออกเป็น 2 โครงงาน โดยในโครงงานที่ 1 จะเป็นการทดสอบแบบง่ายๆ โดยเน้นไปในส่วนของกลไกการทำงาน และในโครงงานที่ 2 จะเน้นการทดสอบการทำงานในส่วนของวงจรอิเล็กทรอนิกส์
โครงงานที่1 (Crocodile1) การทดสอบ เริ่มจากเปิดสวิตช์ SW1 มอเตอร์จะเริ่มทำงาน และส่งกำลังผ่านส่วนต่างๆ ขาของตัวหุ่นยนต์ทั้ง 2 ซีกจะต้องทำงานสัมพันธ์กัน เช่นถ้าขาทางซีกขวาขยายออก ขาทางซีกซ้ายจะบีบลงตามรูปที่ 3
โครงงานที่2 (Crocodile2)
การทดสอบ เริ่มจากเปิดสวิตช์ SW1 กลไกและมอเตอร์ต้องไม่มีการเคลื่อนไหว ในขั้นต่อไปทำการทดสอบ โดยการใช้มือมาบังส่วนที่เป็นภาคส่งและภาครับทางซ้าย สังเกตุมอเตอร์และกลไกของขาทางด้านขวาจะทำงาน ในทางกลับกันใช้มือมาบังส่วนที่เป็นภาคส่งและภาครับทางขวา สังเกตุมอเตอร์และกลไกของขาทางด้านซ้ายจะทำงาน ในการทดสอบส่วนสุดท้าย ใช้มือบังภาคส่งและภาครับทั้งด้านซ้ายและขวา มอเตอร์และขาหุ่นยนต์ทั้ง 2 ซีกจะทำงานพร้อมกัน
แนวทางการแก้ไข
แนวทางแก้ไขได้แบ่งออกเป็น 2 ส่วน คือในส่วนของกลไก และในส่วนของอิเล็กทรอนิกส์
ส่วนกลไก ในส่วนนี้เป็นส่วนที่เราต้องให้ความสำคัญมาก เมื่อเราเปิดสวิตช์เริ่มการทำงาน ในส่วนของกลไกเกิดการติดขัดไม่สามารถทำงานได้ แนวทางการแก้ไข ต้องทำตรวจสอบว่าเราได้ประกอบในส่วนกลไกถูกต้องหรือไม่ ในส่วนที่มีการสัมผัสกันระหว่างพลาสติกกับพลาสติกต้องมีแหวนรองเสมอ ในส่วนข้อเหวี่ยง การทำเกลียวมีความสำคัญมาก รูที่เจาะเพื่อใช้ทำเกลียวต้องตรงกับรูที่เจาะเพื่อใช้ใส่แกนทดรอบ
ส่วนวงจรอิเล็กทรอนิกส์ ในโครงงาน Crocodile
1 เป็นวงจรกลับขั้วมอเตอร์ จุดที่น่าจะเกิดปัญหา จะอยู่ที่การกัดแผ่นลายวงจร อาจมีการช๊อตขึ้น หรือลายวงจรขาด ในโครงงาน Crocodile
2 เป็นวงจรที่มีความยุ่งยากขึ้นมาอีกระดับหนึ่ง ควรให้ความสำคัญในการกัดลายวงจรและการลงอุปกรณ์ ถ้าระบบไม่สามารถตรวจจับวัตถุได้ สิ่งแรกที่ควรพิจารณา อยู่ที่การใส่หลอดอินฟาเรดทั้งตัวส่งและตัวรับว่ามีการใส่อุปกรณ์กลับขั้วหรือไม่ เมื่อระบบสามารถตรวจสอบวัตถุได้แล้วแต่ปรากฏว่าเกิดการเดินถอยหลัง ให้ทำการสลับขั้วมอเตอร์ด้านที่เกิดปัญหา
รายการอุปกรณ์
โครงงานCrocodile1
1. มอเตอร์รุ่น UNIVERSAL GEARBOX 1 กล่อง
2.รังถ่าน 6 โวลท์ 1 อัน
3. แผ่นลายวงจร 1 แผ่น
4. สวิตช์เลื่อน 2ทาง 1 ตัว
5. สวิตช์กดแบบ 2 ทาง 1 ตัว
6. คาปาซิเตอร์ 0.01 uF 1 ตัว
7. สายไฟ
8. น๊อตแกน 3 มิลลิเมตร ยาว 20 มิลลิเมตร 22 ตัว
9. น๊อตหกเหลี่ยม แกน 3 มิลลิเมตร 4 ตัว
10. ฐานรองปรินท์แบบสั้น 4 ตัว
11. แผ่นพลาสติกขนาด 5 มิลลิเมตร 1 แผ่น
12. แผ่นพลาสติกขนาด 3มิลลิเมตร 1 แผ่น
โครงงานCrocodile2
ตัวต้านทาน ขนาด ? วัตต์ +-5%
R1 ,R2 100 โอห์ม 2 ตัว
R3 ,R4 50 กิโลโอห์ม 2 ตัว
R5 ,R6 10 กิโลโอห์ม 2 ตัว
ตัวเก็บประจุ
C1 ,C2 0.01uF เซรามิค 2 ตัว
อุปกรณ์สารกึ่งตัวนำ
Q1 ,Q2 S8050 2 ตัว
IC1 L293D 1 ตัว
LED1 ,LED2 ภาคส่งอินฟาเรด 2 ตัว
PR1 ,PR2 ภาครรับอินฟาเรด 2 ตัว
อื่นๆ
ซ๊อกเกต 16 ขา 1 ตัว
แผ่นลายวงจร 1 แผ่น
สวิตช์ 2 ทาง 1 ตัว
ที่พักสาย 2 จุด 3 ตัว
รังถ่าน 6 โวลท์ 1 อัน
พลาสติกใสหนา 5 มิลลิเมตร 1 แผ่น
พลาสติกใสหนา 3 มิลลิเมตร 1 แผ่น
ฐานรองปรินท์ 2 อัน
น๊อตแกน 3 มิลลิเมตรยาว 20 มิลลิเมตร 18 ตัว
น็อตแกน 3 มิลลิเมตรยาว 50 มิลลิเมตร 2 ตัว
น็อตหกเหลี่ยม 3 มิลลิเมตร 4 ตัว
มอเตอร์รุ่น TWIN MOTOR GEARBOX 1 ตัว
แนวทางการพัฒนาต่อไป
ในโครงงานที่เราได้สร้างขึ้นนี้ เป็นการสร้างหุ่นยนต์ที่แสดงให้เห็นการทำงานอย่างง่ายๆ ไม่ยุ่งยากซับซ้อน ถ้าน้องๆ ถ้าอ่านบทความแล้ว ยังไม่เห็นภาพการทำงานของหุ่นยนต์ทั้ง 2 แบบ ก็สามารถเข้ามาดูการทำงานเป็นภาพเคลื่อนไหวได้ที่ www.basiclite.com ความสามารถของหุ่นยนต์ Crocodile
1 และ Crocodile2 จะมีความสามารถอยู่ในระดับพื้นฐาน หรืออาจจะเรียกว่าใช้ในการเริ่มต้นการเรียนรู้เลยก็ว่าได้ แนวทางการพัฒนาตัวหุ่นยนต์ ให้มีความสามารถเพิ่มขึ้นแบบไร้เทียมทานได้อย่างไรนั้น ก็ขึ้นอยู่กับน้องๆ จะจินตนาการสร้างสรรค์ขึ้นเองครับ แต่ถ้าจะเพิ่มความสามารถ ของหุ่นยนต์แบบสุดๆ ไม่เป็นรองใครผมก็จะขอเสนอการใช้ไมโครคอนโทรลเลอร์ ST7 เข้าควบคุมระบบทั้งหมด สามารถทำการดัดแปลงวงจรได้จาก หนังสือ Hobby Electronic ฉบับที่ 142 หน้าที่ 61 ครับ