วงจรพื้นฐานง่าย ๆ อีกแบบหนึ่ง
ซึ่งทำให้บีมโรบอตวิ่งตามแสงได้

แนวการออกแบบวงจร จากนิตยสาร Hobby Electronics ปีที่ 11 ฉบับที่ 121 มิ.ย. – ก.ค. 2545
ในการออกแบบวงจรเราต้องวิเคราะห์ถึงปัญหาที่เกิดขึ้นเสียก่อน โดยหุ่นยนต์ต้องมีความสามารถเลี้ยวซ้าย เลี้ยวขวาเสียก่อน เป็นอิสระจากกันและต้องขึ้นอยู่กับแสงที่ให้ด้วย มอเตอร์ต้องเป็นมอเตอร์ที่มีขนาดเล็กและมีน้ำหนักเบา แต่มอเตอร์ที่มีขนาดเล็กแม้อาจจะไม่สามารถให้แรงบิดสุงได้ ดังนั้นถ้าเราต้องการให้หุ่นยนต์วิ่งตามแสงได้ อุปกรณ์ทุกอย่างที่ใช้ต้องมีขนาดเล็กที่สุดและน้ำหนักเบาที่สุดอีกด้วย จากปัญหาที่เกิดขึ้นทั้งหมดนี้จึงเป็นที่มาของวงจรหุ่นยนต์เดินตามแสงขึ้นมา
วงจรออกแบบแม้จะไม่คล้ายกับวงจรที่เคยเห็น แต่ก็สามารถทำให้บีมทำงานได้และเป็นวงจรง่าย ๆ การเลือกที่ไอซีเบอร์ ULN2003 มาเป็นหัวใจหลักของบีมตัวนี้ก็คือ มีราคาถูกสามารถขับกระแสได้ประมาณ 500 มิลลิแอมป์
ลักษณะการทำงานของ ULN2003 จะเหมือนนอตเกตและยังมีไดโอดป้องกันอีกด้วย โดยไอซีเบอร์นี้จะทำหน้าที่เป็นตัวขับกระแสและเป็นสวิตซ์เปิดปิดให้มอเตอร์ทำงานหรือหยุดการทำงาน สิ่งที่เราต้องพิจารณามากที่สุดในการออกแบบก็คือแรงดันอินพุตสูงสุดที่จะทำให้ไอซีเบอร์นี้ทำงาน
รูปที่ 1 แสดงตำแหน่งขาไอซีและแรงดันอินพุต จะเห็นว่าถ้ามีแรงดันมากกว่าหรือเท่ากับ 2.4 โวลต์ เข้ามาทางอินพุตของเกตภายในไอซี ค่าแรงดันทางด้านเอาต์พุตของเกตภายในไอซีจะเป็นลอจิกต่ำแน่นอน

ซึ่งจะทำให้มอเตอร์ทำงานทันที การออกแบบภาคตรวจจับแสงทำได้
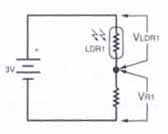
โดยใช้หลัการแบ่งแรงดันพื้นฐาน ดังรูปที่ 2 โดยพิจารณา LDR
เป็นความต้านทานแบบปรับค่าได้ (ขึ้นอยู่กับแสง)
VR1 = [ (VCC)R1]/[ LDR1 + R1] …(1)
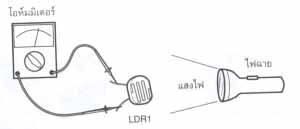
LDR1 หาได้จากการวัดค่าที่พอใจการวัดระยะทางระหว่า LDR และแสงไฟ ดังรูปที่ 3
ซึ่งในการวัดหาค่า LDR1 ที่ได้จากการวัดนี้เราจะใช้ค่าประมาณ 5 กิโลโอห์ม เมื่อเราทราบค่า LDR แล้วสิ่งที่ต้องรู้อีกหนึ่งตัวคือแรงดันที่ VR1 ให้เท่ากับ VIN(ON) หรือเท่ากับ 2.4 โวลต์ ดังนั้นจึงสามารถแทนค่าต่างๆ ในสมการได้แต่เราต้องการให้มีการแทนค่าเพื่อหาค่า R1 แปลงสมการที่ 1 ดังนี้
จาก VR1 = [(VCC)R1]/ [LDR1 + R1]
จะได้ R1 = [(- VR1)R1]/ [VR1 – VCC] …(2)
แทนค่าเพื่อหาค่า R2 จะได้
R2 = [(-2.4) (5k)]/ [2.4-3]
= 20 กิโลโอห์ม
เมื่อเราได้หาค่า LDR1 และ R1 แล้ว หากมีแสงเข้ามาในระยที่เราคำนวณไว้ รับรองว่าหุ่นยนต์ของเราจะวิ่งตามแสงได้แน่นอน
หลักการทำงาน
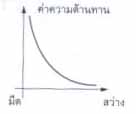
นโครงงานนี้เราจะใช้ตัวตรวจจับแสง LDR ซึ่งตัว LDR นี้มีคุณสมบัติคือ เมื่อมีแสงมาตกกระทบมันค่าความต้านทานภายในจะลดลงมากหรือน้อยขึ้นอยู่กับแสงที่ให้ แต่ถ้าไม่มีแสงและมืดมากๆค่าความต้านทานของ LDR ก็จะมีค่ามากด้วยดังรูปที่ 4
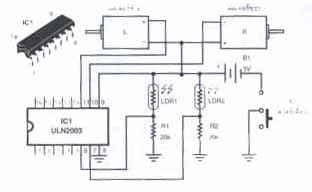
วงจรการทำงานดังในรูปที่ 4 ซึ่งมีลักษณะการทำงานดังนี้
กรณีที่ 1 เมื่อมีแสงฉายเข้ามาที่ LDR1 และ LDR2 ข้างซ้ายและขวาเท่า ๆ กัน จะทำให้แรงดันตกคร่อม R ค่า 20 กิโลโอห์ม ทั้งสองตัวเพิ่มขึ้นเป็นประมาณ 2.4 โวลต์ หรือมากกว่าซึ่งจะทำให้ขา 6 และขา 7 ของ IC1 เบอร์ ULN2003 เป็นลอกจิกสูง ซึ่งไอซีตัวนี้ทำหน้าที่เสมือนนอตเกต ซึ่งจะทำให้ขา 10 และขา 11 เป็นลอจิกต่ำ และมีแรงดันไฟบวกรอที่ขามอเตอร์อยู่แล้ว จะวิ่งผ่านขดลวดของมอเตอร์ทั้งสองลงกราวด์ที่เป็นตัวรับกระแส จึงทำให้มอเตอร์ทั้งสองหมุนพร้อมกัน ทำให้หุ่นยนต์ของเราวิ่งเข้าหาแสงทันที
กรณีที่ 2 ถ้า LDR างด้านซ้ายได้รับแสงเพียงข้างเดียว จะเกิดลอจิกสูงที่ขา 7 ของไอซี ซึ่งจะทำให้มอเตอร์ขวาทำงานทันที เมื่อมอเตอร์ขวาทำงาน จะเคลื่อนที่เอา LDR ทางขวาซี่งไม่ได้รับแสงมารับแสงทันที จึงทำให้สามารถที่จะรับแสงได้เท่ากันและวิ่งเข้าหาแสงได้
กรณีที่ 3 ถ้า LDR ทางด้านขวาได้รับแสงเพียงข้างเดียวก็จะเกิดลอจิกสูงที่ขา 6 ของไอซี จึงทำให้มอเตอร์ซ้ายทำงานทันทีและจะเคลื่อนที่เอา LDR ทางซ้ายมารับแสงจึงทำให้ได้รับแสงเท่ากันและวิ่งเข้าหาแสงได้ดังรูปที่ 6 และรูปที่ 7

แนวทางการสร้าง
เนื่องจากวงจรที่เราออกแบบมานั้นมีขนาดที่เล็กและมีอุปกรณ์น้อย เราจึงสามารถเชื่อมต่ออุปกรณ์เข้าหากันโดยตรงได้เลย โดยหาอุปกรณ์ให้ครบตามรายการอุปกรณ์
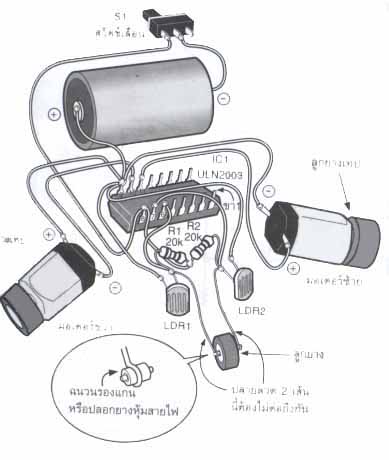
การเชื่อมต่ออุปกรณ์ให้ดูตามรูปที่ 8 โดยจะมีมอเตอร์เป็นฐาน การเอียงของมอเตอร์จะช่วยในการถ่ายน้ำหนัก เพราะจะต้องมีการบรรทุกแบตเตอรี่และไอซีทำให้หุ่นยนต์ที่เราสร้างขึ้นมามีการยกระดับให้สูงขึ้นเพื่อความสวยงาม
การเชื่อมต่ออุปกรณ์ โดยนำไอซีวางบนมอเตอร์ก่อนค่อย ๆ เชื่อมสานต่อต่าง ๆ ตามวงจรและเชื่อมต่อตัวต้านทานและ LDR และใส่แบตเตอรี่ 3 โวลต์ ไว้ด้านบนไอซีเป็นขั้นตอนสุดท้าย ดัดขาต่างๆ ให้ได้ดังรูป ก็เป็นอันเสร็จการสร้างหุ่นยนต์วิ่งตามแสง
การทดสอบและการใช้งาน
ยกตัวหุ่นยนต์ขึ้น ฉายไฟฉายไปที่ LDR ตัวซ้าย สังเกตมอเตอร์ทางขวาจะทำงาน ถ้าฉายแสงไฟฉายไปที่LDR ตัวขวามอเตอร์ทางซ้ายจะทำงาน ถ้าเราทำมาถึงขั้นนี้วงจรทำงานเกือบสมบูรณ์แล้ว และทดสอบครั้งสุดท้าย โดยการฉายแสงไฟไปที่ LDR ั้งสองตัวต้องทำงานพร้อมกันทันที
และเมื่อมาถึงขั้นนี้แล้วเห็นว่าเราน่าจะสามารถปรับแต่งตัว LDR ในการหันรับแสงอย่างไร จึงสามารถตอบสนองต่อแสงได้ดีที่สุด หรืออาจจะเปลี่ยนระยะการรับแสงได้จากการเปลี่ยนตัวต้านทานตามสูตรที่ให้มา ลองปรับแต่งกันดูนะครับ เพื่อจะได้หุ่นยนต์ที่สมบูรณ์แบบ เป็นการออกแบบจากมือของเราเอง
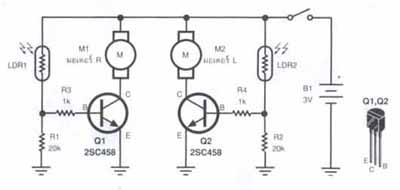
แต่ถ้าเราต้องการให้หุ่นยนต์มีขนาดเล็กกว่าที่เราทำมาข้างต้นเราก็สามารถที่จะทำได้แต่เราต้องประกอบวงจรยากขึ้นอีกนิดหน่อยและเรียนรู้การทำงานของทรานซิสเตอร์อีกนิด
แต่คงไม่ยากเกินความสามารถของนักอิเล็กทรอนิกส์อย่างเราๆ ดังนั้นจึงขอนำเสนอวงจรที่ใช้ทรานซิสเตอร์ดังตัวอย่างวงจรในรูปที่ 9 เผื่อที่จะได้ลองทำกันดูนะครับ
รายการอุปกรณ์
R1,R2 – 20 k ตัวต้านทานขนาด1/4 วัตต์ 5% 2 ตัว
LDR1,LDR2 – ตัวตรวจจับแสง 2 ตัว
IC1 – ไอซีเบอร์ ULN2003 1 ตัว
มอเตอร์ DC 3 โวลต์ ขนาดเล็ก 2 ตัว
ลูกยางเทป 3 ตัว
ถ่าน VARTA รุ่น CR123A หรือ Panasonic 1 ก้อน
สวิตซ์เลี่อน 1 ตัว
สายไฟ, ปืนกาว, กาวพลาสติก, ตะกั่ว เป็นต้น
ข้อเสนอแนะ
ถ่านที่ใช้ต้องมีน้ำหนักเบาและขนาดค่อนข้างเล็กให้กระแสที่สูง ดังนั้นหุ่นยนต์ต้นแบบที่ทำขึ้นมานั้นได้ทดสอบกับถ่านของ VARTA รุ่น CR123A ซึ่งมีแรงดัน 3 โวลต์ และมีกระแส 1300 มิลลิแอมป์ และถ่านของ Panasonic Lithium (ราคาถูก) 3 โวลต์ หาได้จากร้านอิเล็กทรอนิกส์แถว ๆ บ้านหม้อหรือจากร้านขายอุปกรณ์อิเล็กทรอนิกส์ทั่วไป
ทีนี้เราก็จะได้เจ้าหุ่นยนต์ตัวจิ๋วที่วิ่งเข้าหาแสงเป็นของเล่นอีกหนึ่งชิ้น ซึ่งเราสามารถทำขึ้นและออกแบบเองได้อย่างเต็มความภาคภูมิใจเลยทีเดียว