การทำให้หุ่นยนต์เดินได้
โดยไม่ต้องใช้โปรแกรม ง่ายกว่าทึ่คิด เพียงแค่ศึกษาเคล็ดลับสักนิด จะรู้คำตอบ
หุ่นยนต์เคลื่อนที่อย่างไร จากนิตยสาร Hobby Electronics ปีที่ 11 ฉบับที่ 123 ก.ย.. 2545 |
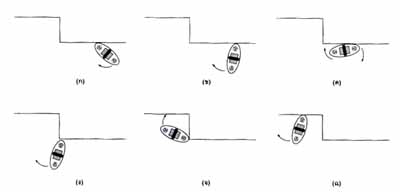
เรามาดูการทำงานของตัวหุ่นยนต์ก่อนนะครับว่าจะทำงานได้อย่างไรในรูปทรงที่แปลก ๆ ดูในรูปที่ 1 จะเห็นว่าหุ่นยนต์เคลื่อนที่ไปในลักษณะหมุนตัวตามขอบผนังที่ขวางกั้น เรามาเจาะลึกถึงประเด็นของการทำงานเลยดีกว่าครับ
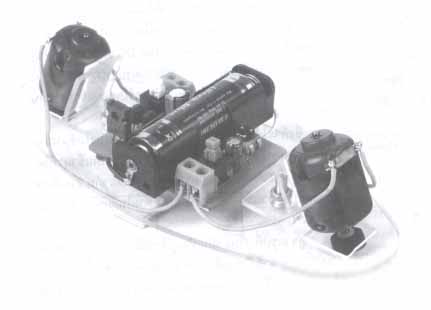
ในตัวหุ่นยนต์จะประกอบด้วยมอเตอร์ไฟตรง 2 ตัว (ใช้มอเตอร์ DC ทั่วไปหาได้จากร้านขายรถแข่ง รถกระป๋อง) โดยที่แกนของมอเตอร์จะใส่ล้อซึ่งทำจากลูกยางเทป หุ่นยนต์ตัวนี้สามารถที่จะวิ่งหาทางออกจากสิ่งกีดหขวางเช่นเขาวงกตได้เองหรือบริเวณใด ๆ ก็ได้ที่มีขอบทางให้หุ่นยนต์สามารถวิ่งได้
มอเตอร์จะถูกติดตั้งที่ส่วนท้ายทั้ง 2 ด้าน เมื่อเราเปิดสวิตซ์เริ่มเดินในรูปที่ 1(ก) มอเตอร์ตัวที่ 1 จะหยุดทำงานเพระาขอบท้ายของตัวหุ่นยนต์ติดกับขอบผนัง จึงทำให้มีแรงขับเคลื่อนสูงสู่มอเตอร์ตัวที่ 2 ที่เป็นอิสระ ทำให้มอเตอร์ 2 ทำงานเพียงตัวเดียวในขณะนั้น เมื่อมอเตอร์ตัวที่ 2 ทำงาน จะผลักในส่วนท้ายที่ 2 ของหุ่นยนต์ทำให้เกิดแรงเหวี่ยงไปตามทิศทางของลูกศรและมอเตอร์ 2 จะวิ่งไปจนเกือบจะถึงกำแพง ดังรูปที่1 (ข) มอเตอร์ 1 จะเป็นอิสระจากการหมุนของมอเตอร์ 2 ทำให้หุ่นยนต์ถึงขอบกำแพงเร็วขึ้น และก็จะกลับสู่รูปแบบเดิม คือ มอเตอร์ตัวที่ 2 จะหยุด ทำให้กิดแรงหมุนของมอเตอร์ 1 ที่รุนแรงจึงเกิดการเหวี่ยงที่ส่วนท้ายที่ 1 ไปตามทิศทางของแนวลูกศร ดังรูปที่ 1(ค) เข้าสู่กำแพงอีกและจะเป็นเช่นนี้ไปเรื่อย ๆ
เหตุการณ์ต่างๆ ที่กล่าวนี้ คือหลักการเดินของหุ่นยนต์ตัวนี้ครับนอกจากนั้นหุ่นยนต์ตัวนี้ยังสามารถเดินเกาะขอบผนังที่ไม่ได้อยู่ในระดับเดียวกันอีกนะครับ ดังรูปที่ 1(จ) และรูปที่ 1(ฉ) ดังนั้นหากแนวผนังที่มีเส้นทางคดเคี้ยวเป็นเขาวงกต เจ้าROTOR1 ตัวนี้จะตะลุยแหลกแหกด่านได้สบาย เมื่อพี่ ๆ น้อง ๆ อ่านมาถึงจุดนี้แล้ว เราลองมาทำของเล่นชิ้นนี้กันเลยดีกว่าครับ
ชิ้นส่วนของตัวหุ่นยนต์
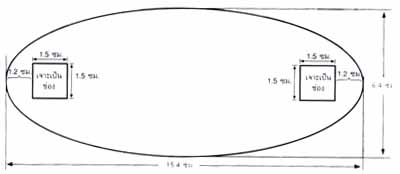
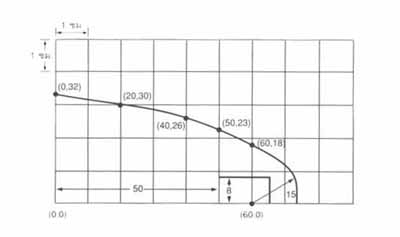
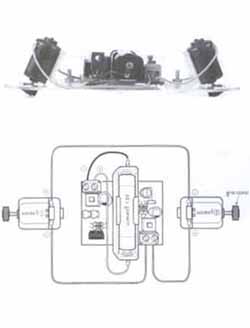
ในส่วนฐานดังในรูปที่ 2 จะใช้พลาสติกใสที่มีความหนา 2 มิลลิเมตร ตัดเป็นส่วนฐานโดยวัดและตัดตามแบบ ตัวฐานจะมีขนาดกว้าง 6.4 เซนติเมตร และยาว 15.4 เซนติเมตร ในส่วนปลายทั้ง 2 ด้าน ใช้วงเวียนวัดให้มีโครงร่างส่วนปลายดังในรูปที่ 3 ให้วัดจากส่วนปลายของทั้งสองด้านเข้ามาข้างละ 1.2 เซนติเมตร แล้วให้วาดกรอบสี่เหลี่ยมที่มีขนาดกว้าง 1.5 เซนติเมตร และยาว 1.5 เซนติเมตร เป็นรูปสี่เหลี่ยมจตุรัส
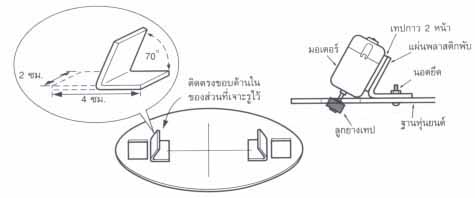
จากนั้นจะต้องเจาะเป็นช่องตามรูปเพี่อที่จะนำส่วนล้อของมอเตอร์มาวางตรงส่วนนี้ให้หุ่นยนต์สามารถวิ่งได้ ในรูปที่ 4 ส่วนนี้เราจะทำเป็นที่วางมอเตอร์ ซึ่งจะใช้พลาสติกขนากความหนา 2 มิลลิเมตร ตัดให้มีขนาดกว้าง 2 เซนติเมตร และยาว 3 เซนติเมตร พับให้มีมุม 70 องศา แล้วนำไปติดกับบริเวณส่วนฐานให้ชิดกับช่องที่ตัด
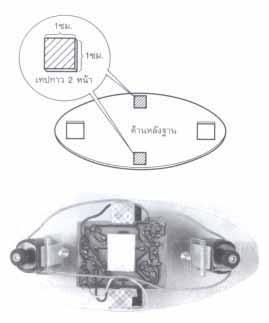
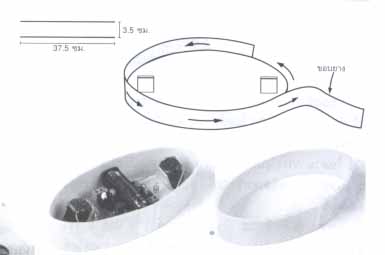
ในรูปที่ 5 ส่วนนี้เราจะใช้เทปกาว 2 หน้า ตัดให้มีขนาดกว้าง 1 เซนติเมตร ยาว 1 เซนติเมตร แล้วนำไปติดบริเวณส่วนใต้ฐานทั้ง 2 ด้าน เพื่อสร้างความสมดุลให้กับฐาน ในรูปที่ 6 ส่วนนี้เราจะใช้แผ่นยางที่มีลักษณะเหมือนโฟมละเอียด (หาซื้อได้ตามร้านขายเครื่องเขียนทั่วไป) วัดให้มีขนาดกว้าง 3.5 เซนติเมตร ยาว 37.5 เซนติเมตร ตัดตามขนาดแล้วนำไปติดบริเวณโดยรอบขอบฐาน
หลักการทำงาน
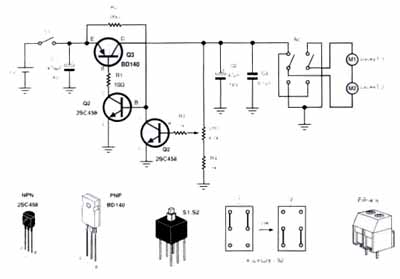
วงจรการทำงานดังรูปที่ 7 เมื่อเราเริ่มกดสวิตซ์ S1 จะมีกระแสไหลผ่าน R2 เข้าไปไบอัสให้ทรานซิสเตอร์ Q2 ทำงานและทำให้มีกระแสจากขาคอลเล็กเตอร์ (C) ของ Q2 ไหลผ่านขาอิมิเตอร์ (E) ไปลงกราวด์ ซึ่งเกิดผลทำให้เสมือนเป็นการไบอัสให้กับทรานซิสเตอร์ Q3 ซึ่งทำให้กระแสไหลผ่านเข้าสู่มอเตอร์ทั้ง 2 ตัว ทำให้มอเตอร์หมุน
ขณะที่ทรานซิสเตอร์ Q3 ทำงานจะมีกระแสส่วนหนึ่งวิ่งเข้าสู่ทรานซิสเตอร์ Q1 โดยที่กระแสส่วนนี้จะเป็นกระแสป้อนกลับ เพื่อเป็นการควบคุมไบอัสให้ขาเบส (B) ของทรานซิสเตอร์ Q3 ในส่วน VR1 เป็นตัวต้านทานที่ใช้กำหนดกระแสไบอัสที่ขาเบสของทรานซิสเตอร์ Q1 เพื่อควบคุมความเร็วของมอเตอร์
ทรานซิสเตอร์ Q3 เป็นตัวขับมอเตอร์ 1 และ 2 เราสามารถกลับทิศทางของมอเตอร์ โดยใช้สวิตซ์ S2 การกดสวิตซ์นี้หมายถึง การที่หุ่นยนต์ของเราจะสามารถเดินหน้าหรือถอยหลังได้ตามที่เราต้องการ (ทวนเข็มนาฬิกาหรือตามเข็มนาฬิกา)
การสร้าง
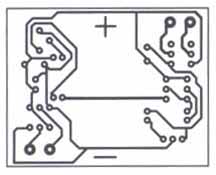
นอกจากส่วนประกอบต่าง ๆ ของตัวหุ่นยนต์แล้วส่วนควบคุมถือว่าเป็นส่วนประกอบสำคัญของหุ่นยนต์ตัวนี้ การสร้างในส่วนนี้จะทำง่าย โดยเราสามารถนำลายวงจรที่มีอยู่ดังในรูปที่ 8 มากัดออกมาเป็นลายปริ้นต์หรือหากใครที่ไม่ชอบการกัดปริ้นต์ด้วยกรดก็ใช้ปริ้นต์เอนกประสงค์ก็ได้ตามสะดวก
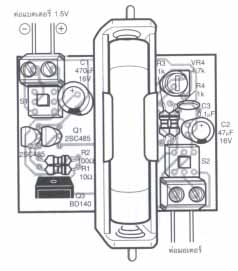
เมื่อได้แผ่นวงจรพิมพ์มาแล้ว ให้ลงอุปกรณ์บนแผ่นวงจรพิมพ์ดังในรูปที่ 9 โดยเริ่มจากตัวอุปกรณ์เล็กเตี้ยที่สุดก่อน เช่น ตัวต้านทาน, ตัวเก็บประจุ, ทรานซิสเตอร์, สวิตซ์, ที่พักสาย, ลังถ่าน (1 ก้อน) เมื่อประกอบวงจรเสร็จแล้ว ให้ต่อสายไฟต่าง ๆ ให้ครบและทดสอบการทำงาน
ทดสอบการทำงาน
ให้กดสวิตซ์ S1 มอเตอร์ทั้ง 2 ตัว จะต้องหมุน โดยมีความเร็วประมาณเท่า ๆ กัน ให้ใช้นิ้วมือจับมอเตอร์ตัวที่ 1 จนหยุดหมุน จะเห็นว่ามอเตอร์ตัวที่2 หมุนเร็วขึ้นกว่าเดิม หลังจากนั้นลองจับมอเตอร์ตัวที่ 2 ให้หยุด มอเตอร์ตัวที่ 1 จะต้องกลับมาหมุนเร็วขึ้นอีกเช่นกัน
ทดสอบเพียงเท่านี้ก็หมายความว่า หุ่นยนต์ของเราก็สามารถเดินได้แล้ว เพียงแต่เดินได้ทางเดียว ดังนั้นลองทดสอบการหมุนกลับของมอเตอร์ โดยกดสวิตซ์ S2 จะสังเกตเห็นว่ามอเตอร์หมุนกลับทิศทางได้เอง มาถึงจุดนี้แล้วงานในส่วนของวงจรอิเล็กทรอนิกส์สำเร็จไป 90 เปอร์เซ็นต์ ให้ลองใช้ไขควงหมุนที่ตัว VR1 ไปทั้งทางด้านซ้ายและขวา จะเห็นว่ามอเตอร์มีความเร็วเพิ่มขึ้นหรือลดลง ซึ่งก็คือ เป็นการปรับค่าความเร็วของการเดินของหุ่นยนต์นั่นเอง
ขั้นตอนการประกอบ
เมื่อเราจัดเตรียมชิ้นส่วนของวงจรและอุปกรณ์ต่าง ๆ ครบแล้ว เราก็เริ่มลงมือประกอบให้เป็นตัวได้เลย โดยเริ่มจาก
ขั้นตอนที่ 1 นำชิ้นส่วนที่ใช้วางมอเตอร์มาติดกับส่วนที่เป็นฐาน
ขั้นตอนที่ 2 นำลูกยางเทปมาติดกับส่วนแกนหมุนของมอเตอร์ จากนั้นให้นำมอเตอร์มาติดกับบริเวณที่วางมอเตอร์โดยให้ส่วนล้ออยู่ตรงบริเวณช่องที่ตัดไว้พอดี
ขั้นตอนที่ 3 นำส่วนแผงวงจรมาติดตั้ง โดยต้องตั้งให้อยู่บริเวณจุดศูนย์กลางของส่วนฐาน เพื่อสร้างความสมดุล
ขั้นตอนที่ 4 เมื่อนำส่วนประกอบต่างๆ มาติดตั้งเรียบร้อยแล้ว จากนั้นคือ ขั้นตอนของการตกแต่งให้สวยงาม โดยหาแบบตัวการ์ตูนที่เราชอบมาประกอบติดกับตัวฐาน เท่านี้เราก็จะได้หุ่นยนต์ที่ทำด้วยฝีมือของตัวเองอีกชิ้นหนึ่งแล้วครับ
ขั้นตอนทั้งหมดให้ดูรูปประกอบที่ผ่านมา ส่วนการเดินสายไฟดังในรูปที่ 10
รายการอุปกรณ์
ตัวต้านทาน ขนาด 1/4 วัตต์ 5%
R1 – 10 k 1 ตัว
R2 – 100 1 ตัว
R3,R4 – 1 k 2 ตัว
VR1 – 4.7 k 1 ตัว
ตัวเก็บประจุ
C1 – 470 uf 16v อิเล็กทรอไลต์ 1 ตัว
C2 – 47 uf 16v อิเล็กทรอไลต์ 1 ตัว
C3 – 0.1 uf 50v โพลีเอสเตอร์ 1 ตัว
อุปกรณ์สารกึ่งตัวนำ
Q1,Q2 – ทรานซิสเตอร์เบอร์ 2SC458 2 ตัว
Q3 – ทรานซิสเตอร์เบอร์ BD140 1 ตัว
อื่น ๆ
S1,S2 – สวิตซ์กดติดปล่อยดับ 6 ขา ลงปริ้นต์ 2 ตัว
M1,M2 – มอเตอร์DC 2 ตัว
ลังถ่าน 1 ก้อน 1 อัน
ถ่าน ALKALINE 1.5V ขนาด AAA 1 ก้อน
ที่พักสาย 2 จุด 2 ตัว
สายไฟยาว 1 เมตร
แผ่นพลาสติกใสหนา 2 มิลลิเมตร
ขนาด 20X8 ตารางเซนติเมตร 1 ตัว
นอตเกลียวละเอียดขนาด 3 มิลลิเมตร 2 ตัว
แผ่นลายวงจร 1 แผ่น
ลูกยางเทป 2 ลูก
เทปกาว 2 หน้า, ชุดเลื่อยฉลุ, ตะกั่ว

ทดลองเดินและข้อเสนอแนะ
การเดินทางของหุ่นยนต์ ถ้าให้เดินตามผนังที่มีระดับเดียวกันคงไม่ตื่นเต้นและไม่ได้แสดงความสามารถของหุ่นยนต์ตัวนี้ ดังนั้นเราลองมาสร้างทางคดเคี้ยวมีผนังกั้นเป็นเขาวงกตดังตัวอย่างในรูปที่ 11 อาจใช้ไม้หรือลังกระดาษแข็ง ๆ ก็ได้ แล้วลองดูว่าหุ่นยนต์ของเราสามารถหาทางออกจากเขาวงกตได้หรือไม่ หรือจะแข่งขันกันว่าใครจะออกก่อนโดยใช้เวลาเดินทางน้อยที่สุดก็ต้องลองทำกันดูนะครับ
ส่วนเทคนิคและข้อเสนอแนะคือ การดัดพลาสติกสำหรับที่วางมอเตอร์ให้ใช้ความร้อนของหัวแร้งมาลูบไล้ที่พลาสติกตรงส่วนที่ต้องการดัดจนพับงอได้ สำหรับการตัดพลาสติกให้ใช้เลื่อยฉลุ จุดสำคัญในการตัดพลาสติกโดยใช้ใบเลื่อยฉลุ จะต้องมีความสม่ำเสมอในการออกแรงเลื่อยมิฉะนั้นพลาสติกอาจจะเกิดรอยแตกได้ สำหรับการเจาะรูตรงบริเวณที่วางส่วนล้อจะต้องใช้สว่านเจาะก่อนเพื่อเป็นจุดนำในการเจาะรูโดยรอบจากนั้นจึงใช้เลื่อยฉลุเลื่อยตามช่องที่ได้วัดไว้ตรงบริเวณที่วางล้อ
การวางมอเตอร์ขับเคลื่อนหรือล้อเป็นสิ่งที่มอบข้ามไม่ได้ ต้องให้ล้อยื่นออกไปนอกช่องที่เจาะไว้ ต้องวางให้อยู่ในระดับเดียวกันทั้ง 2 ข้าง และเอียง 70 องศา เพื่อสร้างความสมดุลให้กับตัวหุ่นยนต์ ส่วนการวางถ่านและแผงวงจรต้องวางให้อยู่ในจุดศูนย์กลาง…