เชื่อหรือไม่ว่า!
คุณสร้างชีวิตจิตใจให้หุ่นยนต์ได้

หุ่นยนต์เคลื่อนที่อย่างไร จากนิตยสาร Hobby Electronics ปีที่ 11 ฉบับที่ 124 ต.ค. 2545
เพื่อน ๆ ทราบหรือไม่ว่าหุ่นยนต์มีลักษณะการเคลื่อนที่อย่างไร ถ้าไม่ทราบผมจะขอไขข้อข้องใจให้กระจ่างกับเพื่อน ๆ เองครับ ในหลักการทำงาน เราจะต้องงใช้ดวงตาของหุ่นยนต์เป็นแสงอินฟราเรดทำงานเป็นภาคส่งและภาครับจำนวน 2 คู่ ต่อไปเรามาดูการเคลื่อนที่ของเจ้าตัวหัวใจอ่อนไหวกันเลยดีกว่า
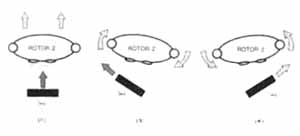
หากมีวัตถุเคลื่อนที่พุ่งเข้าชนตัวหุ่นยนต์ของเราและหุ่นยนต์ตรวจจับได้ก็จะถอยไปด้านหลังทันทีเหมือนเป็นหุ่นยนต์ขึ้ตกใจ แสดงดังรูปที่ 1 การเคลื่อนที่ของหุ่นยนต์ในรูปที่ 1(ก) และจะถอยหลังต่อไปถ้าวัตถุนั้นยังเคลื่อนที่เข้าไปหาและถ้าวัตถุมีการเคลื่อนที่ไปทางด้านซ้ายหรือขวา เจ้าตัวหุ่นยนต์จะทำตัวเป็นหุ่นยนต์ขี้สงสัย หันตามวัตถุนั้นอย่างใกล้ชิดและตามติดเสมือนกับเป็นักข่าวหัวเห็ดดังรูปที่ 1(ข) และรูปที่ 1 (ค)
ชิ้นส่วนของหุ่นยนต์
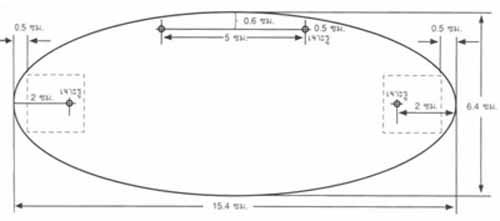
ในส่วนฐานแสดงดังรูปที่ 2 ในส่วนเนื้อหาเรื่อง ROTOR1 ซึ่งเราจะใช้พลาสติกที่มีความหนาขนาด 3 มิลลิเมตร เพื่อสร้างความแข็งแกร่งให้กับโครงสร้างของหุ่นยนต์
พลาสติกในส่วนนี้เราจะต้องตัดจำนวน 2 ชิ้น เพื่อที่จะทำในส่วนฐานและส่วนปิดด้านบนของตัวหุ่นยนต์ ซึ่งทั้ง 2 ชิ้นจะต้องมีขนาดเท่ากัน โดยขนาดของแผ่นพลาสติกจะมีขนาด กว้าง 6.4 เซนติเมตร และยาว 15.4 เซนติเมตร สำหรับชิ้นส่วนฐานปลายทั้ง 2 ด้าน จะต้องเจาะรู โดยวัดจากขอบฐานเข้ามา 2 เซนติเมตร เพื่อยึดกับตัวที่วางมอเตอร์
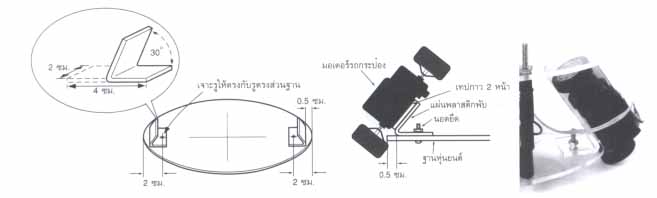
ในรูปที่ 3 ส่วนนี้เราจะทำที่วางมอเตอร์ โดยจะใช้พลาสติกที่มีขนาดความหนา 2 มิลลิเมตร มีขนาดความกว้าง 2 เซนติเมตร และความยาว 4 เซนติเมตร ตัดตามขนาดจำนวน 2 ชิ้น แล้วใช้ความร้อนจากหัวแร้งดัดตรงกลางแผ่นให้ได้ขนาด 30 องศา
จากนั้นนำไปติดกับส่วนฐาน โดยวัดจากขอบส่วนฐานเข้ามา 0.5 เซนติเมตร แล้วนำที่วางมอเตอร์ที่เตรียมไว้มาติดตั้งดังรูปใช้นอตยึดให้แน่น นำมอเตอร์ของรถกระป๋องมาติดกับที่วางฐานโดยใช้กาว 2 หน้าเป็นตัวเชื่อมติด
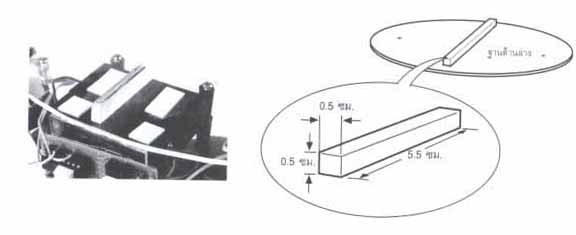
ปที่ 4 ตัวสร้างความสมดุล ในส่วนนี้เราจะใช้พลาสติกที่มีความหนาและกว้าง 0.5 เซนติเมตร และยาว 5.5 เซนติเมตร ซึ่งในส่วนของตัวสร้างจุดสมดุลนี้ หากหาแผ่นพลาสติกขนาดนี้ไม่ได้ สามารถดัดแปลงโดยเปลี่ยนมาใช้แผ่นไม้อัดแทนได้ (ซึ่งหาซื้อได้ตามร้านขายเครื่องเขียนทั่วไป)
ส่วนสร้างจุดสมดุลนี้เราจะนำไปติดบริเวณด้านล่างของส่วนฐาน โดยใช้กาวตราช้างเป็นตัวเชื่อมเพื่อให้ยึดติดกันแน่นหนามากขึ้น
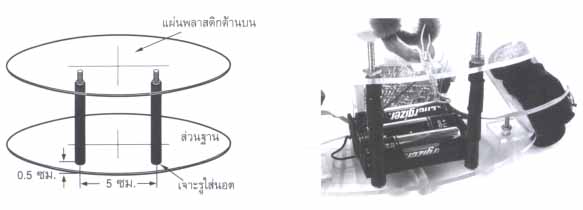
รูปที่ 5 ตัวยึดติดฐานและส่วนบนของหุ่นยนต์ ในส่วนของการยึดตัวฐานและพลานติกด้านบนของหุ่นยนต์นี้ จะใช้นอตขนาด 3 มิลลิเมตร จำนวน 2 ตัวเป็นตัวยึด แล้วใช้พลาสติกรองแผ่นปริ้นต์ (จะใช้ปลอกปากกาก็ได้) เป็นปลอกสำหรับสวมนอตเพื่อให้โครงสร้างของตัวหุ่นยนต์ดูแข็งแรงทนทานมากขึ้น
สำหรับการเจารูใส่นอตจะต้องเว้นให้มีระยะที่พอดี ต้องเจาะรูทั้งแผ่นส่วนฐานและแผ่นพลาสติกด้านบนให้มีระยะที่เท่ากันด้วย
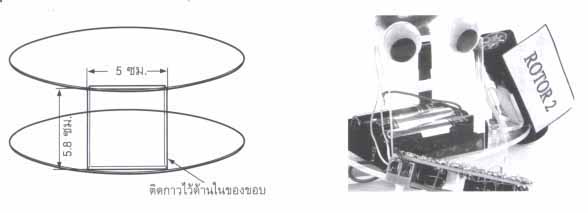
รูปที่ 6 แผ่นติดแผงวงจร สำหรับแผงวงจรเราจะนำไปติดกับแผ่นพลาสติกที่มีขนาดความหนา 2 มิลลิเมตร ความกว้าง 5 เซนติเมตร และความยาว 5.8 เซนติเมตร โดยนำไปติดบริเวณด้านหน้าของหุ่นยนต์ ซึ่งจะนำไปติดตรงบริเวณส่วนด้านในช่วงขอบระหว่างส่วนฐานและส่วนพลาสติกด้านบนสำหรับการติดแผงวงจรและลังถ่านนั้นจะใช้เทปกาว 2 หน้าเป็นตัวเชื่อมติด
แนวทางการออกแบบ
มาพิจารณาตารางค่าความจริงในรูปที่ 7 กันก่อนนะครับ เพื่อที่จะได้ออกแบบการทำงานของหุ่นยนต์ได้ตามความต้องการของเรา
จากตารางค่าความจริงที่เราต้องการ เมื่อ L = 0, R = 1หรือ L = 1, R = 0 จะทำให้มอเตอร์หมุนกลับทิศทางกัน เมื่อ L = 1, R = 1 มอเตอร์จะหมุนถอยหลังและพิจารณาที่ L = 0, R = 0 ตรงจุดนี้จะพิจารณาเป็นพิเศษ เพราะชื่อของโครงงานเราคือ “หุ่นยนต์หัวใจอ่อนไหว” จะไม่มีการวิ่งไปข้างหน้าอย่างเด็ดขาด จึงพิจารณาสภาวะที่เกิดขึ้นว่า เป็นสภาวะของหุ่นยนต์ที่ต้องหยุดนิ่งไม่มีการเคลื่อนที่ เราจึงต้องทำอะไรสักอย่างหนึ่งเพื่อให้สภาวะนี้หยุดนิ่งแต่สภาวะอื่น ๆ มีการเคลื่อนที่ของมอเตอร์ สิ่งที่ทำก็คือ ต้องพิจารณาตารางความจริงของ L293 เมื่อเราให้ขา ENABLE เป็น 0 จะทำให้เกิดสภาวะหนึ่งที่ทำให้มอเตอร์ไม่หมุน เราจึงได้ออกแบบตามบล็อกไดอะแกรมดังรูปที่ 8

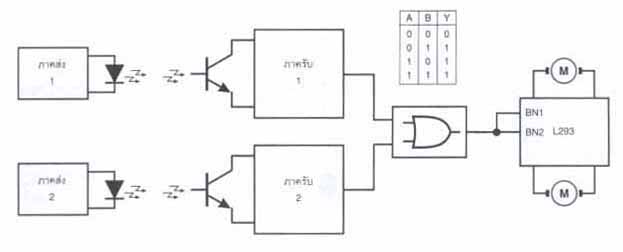
จากรูปจะเห็นว่าตารางค่าความจริงของ OR GATE เมื่อภาครับ 1 และภาครับ2 ไม่ได้รับแสงอินฟาเรด จะเกิดลอจิกต่ำที่ขา EN1และ EN2 ของ L293 จึงทำให้มอเตอร์หยุดหมุนทันที แต่เมื่อภาครับ 1 และภาครับ 2 ได้รับแสง หรือภาครับ 1 และภาครับ 2 ได้รับแสงพร้อม ๆ กันจะเกิดลอจิกสูงที่ขา EN1 และ EN2 จะทำให้มอเตอร์หมุนตามที่เราต้องการ ซึ่งเราจะวิเคราะห์กันในหลักการทำงานของวงจรต่อไป
หลักการทำงานของวงจร
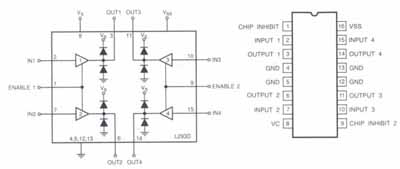
ก่อนที่เราจะเข้าถึงส่วนของวงจรขอแนะแนำ IC2 เบอร์ L293 ซึ่งไอซีเบอร์นี้จะใช้ทำหน้าที่เป็นไอซีขับมอเตอร์ ซึ่งจะขออธิบายการทำงานคร่าว ๆ เพื่อเป็นเกร็ดเล็กเกร็ดน้อยสำหรับท่านผู้อ่าน ไอซีเบอร์ L293 เป็นไอซีที่ใช้ขับมอเตอร์ได้ 2 ตัว เป็นอิสระต่อกัน โดยควบคุมได้จาก IN1, IN2, ENABLE1, IN3, IN4, ENABLE2 และสามารถขับกระแสได้ 1.2 แอมป์ ต่อมอเตอร์ 1 ตัว แถมยังมีการป้องกันตัวเองจากอุณหภูมิที่ร้อนเกินไปอีกด้วย
วงจรภายในและตำแหน่งขาดังรูปที่ 9
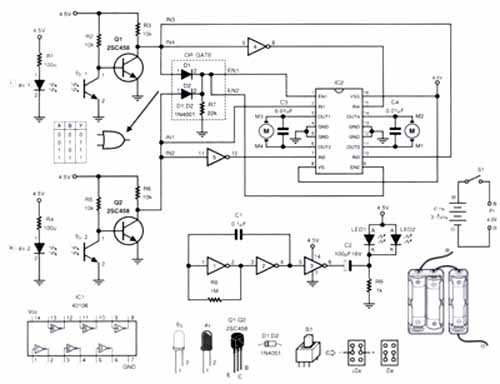
ต่อมาเรามาดูวงจรที่ได้ออกแบบมาเพื่อหุ่นยนต์หัวใจอ่อนไหวกันครับ ดังรูปที่ 10 โดยเริ่มจากภาคส่งอินฟราเรด 2 จุด จะถูกจำกัดกระแสจาก R1 และ R4 โดจจะส่งแสงอินฟราเรดในระยะใกล้ ๆ ประมาณ 5 เซนติเมตร
การพิจารณาภาครับเมื่อภาครับไม่ได้รับแสงที่สะท้อนหรือหักเหมาจากตัวส่งเลยทั้งสองด้าน
จะเกิดลอจิกต่ำขึ้นที่เอาต์พุตของทรานซิสเตอร์ Q1และ Q2 และจะทำให้ขา EN1และEN2ของ L293 เป็นลอจิกต่ำ สภาวะนี้มอเตอร์จะหยุดหมุนทั้งสองด้านไม่ว่าจะอินพุตที่เข้า L293 จะเกิดเป็นอย่างไรก็ตาม
เมื่อภาครับทางซ้ายและทางขวามีการจับแสง จะเกิดลอจิกสูงที่ทางเอาต์พุตของ Q1และQ2 และจะทำให้ขา EN1และ EN2 เป็นลอจิกสูง ทำให้ L293 มีการขับมอเตอร์ตามอินพุตที่เข้ามาซึ่งอินพุตที่เข้ามาตามวงจร จะทำให้เกิดการขับมอเตอร์
ถอยหลังทันที เมื่อภาครับทางซ้ายหรือทางขวาได้รับแสงเพียงข้างใดข้างหนึ่งจะเกิดลอจิกสูงขึ้นที่ขา EN1 และ EN2 ซึ่งจะทำให้มอเตอร์ตัวที่ 1 และ มอเตอร์ตัวที่ 2 ทำงานแบบหมุนกลับทิศทงกัน
ได้เพิ่มลูกเล่นเข้าไปจากเกตที่เหลือของ IC1 เบอร์ 40106 คือ มีไฟกะพริบเกิดขึ้นที่ส่วนขาทั้งสองข้างของตัวหุ่นยนต์ วงจรนั้นก็หยิบมาจากคอลัมน์ “เซอร์กิตไอเดีย” ซึ่งหลักการทำงานของวงจรไฟกะพริบนี้ก็หาอ่านได้ในหนังสือ Hobby ฉบับที่ 123 ครับ
ขั้นตอนการประกอบ
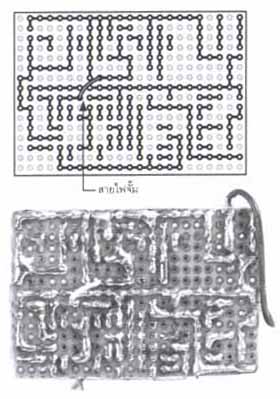
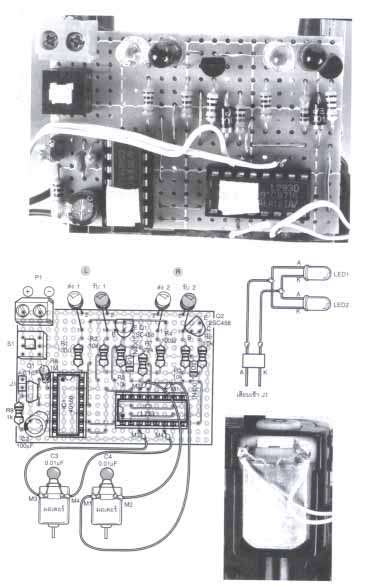
การประกอบส่วนควบคุมหุ่นยนต์จะใช้แผ่นวงจรพิมพ์แบบอเนกประสงค์ โดยเชื่อมต่อจุดต่างๆ ดังในรูปที่ 11 และการลงอุปกรณ์ต่างๆ ดังในรูปที่ 12 ส่วนขั้นตอนการประกอบ หุ่นยนต์มีขั้นตอนดังนี้
ขั้นตอนที่ 1 นำชิ้นส่วนที่วางมอเตอร์มายึดติดกับส่วนฐานแล้วใช้นอตยึด
ขั้นตอนที่ 2 นำมอเตอร์ของรถกระป๋องที่เตรีมไว้จำนวน 2 ชิ้น มาเชื่อมติดกับที่วางมอเตอร์ โดยใช้เทปกาว 2 หน้า ให้ส่วนล้อด้านใดด้านหนึ่งเลยขอบฐานลงมาเล็กน้อย เพื่อให้ล้อสามารถวิ่งได้
ขั้นตอนที่ 3 นำส่วนของแผงวงจรมาติดกับแผ่นพลาสติกที่เตรียมไว้สำหรับติดกับแผงวงจรโดยเฉพาะ จากนั้นนำมายึดติดกับตัวส่วนฐาน
ขั้นตอนที่ 4 นำลังถ่านมายึดติดกับส่วนฐานโดยใช้เทปกาว 2 หน้า เป็นตัวเชื่อมยึดติด
ขั้นตอนที่ 5 นำชิ้นส่วนแผ่นพลาสติกด้านบนมาปิดโดยใช้นอตเป็นตัวยึด
ขั้นตอนสุดท้าย ตกแต่งให้ดูสวยงามมีชีวิตชีวา โดยเราจะหาดวงตาของตุ๊กตาคู่สวย ๆ มาติดบริเวณด้านหน้าของหุ่นยนต์ แล้วตกแต่งใบหน้าใส่ปากเข้าไป แล้วใช้ลวดกำมะหยี่ ตกแต่งให้สวยงามมากขึ้น ROTOR2 มีแต่ใบหน้าอาจจะดูธรรมดาเกินไป เราจึงใส่เขาเข้าไปโดยใช้ลวดกำมะหยี่มาดัดให้เป็นเขาที่สร้างความน่ารักและดูมีชีวิตให้กับเจ้า ROTOR2 ได้มากขึ้นและสามารถกะพริบไฟได้
รายการอุปกรณ์
ตัวต้านทาน ขนาด 1/4 วัตต์ 5 %
R1,R4 – 100 2 ตัว
R2,R3,R5,R6 – 10k 4 ตัว
R7 – 22 k 1ตัว
R8 – 1M 1 ตัว
R9 – 1k 1 ตัว
ตัวเก็บประจุ
C1 – 0.1uf 50V เซรามิก 1 ตัว
C2 – 100uf 16V อิเล็กทรอไลท์ 1 ตัว
C3,C4 – 0.01uf 50V เซรามิก 2 ตัว
อุปกรณ์สารกึ่งตัวนำ
Q1,Q2 – ทรานซิสเตอร์เบอร์ 2SC458 2 ตัว
D1,D2 – ไอโอดเบอร์ 1N4001 2 ตัว
IC1 – ไอซีเบอร์ 40106 1 ตัว
IC2 – ไอซีเบอร์ 293 1 ตัว
ภาครับส่งอินฟราเรด
LED ส่งอินฟราเรด 2 ตัว
LED รับอินฟราเรด 2 ตัว
อื่น ๆ
LED1,LED2 2 ตัว
ซ็อกเกต 14 ขา 1 ตัว
ซ็อกเกต 16 ขา 1 ตัว
ลังถ่านน 2 ก้อน 1 ลัง
ลังถ่าน 1 ก้อน 1 ลัง
สวิตซ์ 2 ทาง 1 ตัว
ห้องเครื่องรถกระป๋อง 2 ชุด
ดวงตาปลอม 1 คู่
นอต 3 มิลลิเมตร ยาว 3 เซนติเมตร 2 ตัว
นอต 3 มิลลิเมตร ยาว 8 เซนติเมตร 2 ตัว
แผ่นพลาสติกตัดตามรูป
สายไฟ, เทปกาว2หน้า, แผ่นพาลามิเซี่ยม, ถ่านไฟฉาย

การทดสอบการทำงาน
หุ่นยนต์ของเราหัวใจจะอ่อนไหวหรือไม่นั้น จะขึ้นอยู่กับการเปิดสวิตซ์นะครับ เมื่อเรากดสวิตซ์ลงไปพิจารณาสิ่งที่เกิดขึ้นต้องมีไฟติดกระพริบที่เขาทั้งสองข้างอย่างรวดเร็ว และหุ่นยนต์เราต้องหยุดนิ่งไม่มีการเคลื่อนที่ใด ๆ ทั้งสิ้น (ต้องทดสอบในที่โล่ง ไม่มีสิ่งกีดขวาง) ถ้ามีการเคลื่อนที่แสดงว่าต่อวงจรส่วนภาครับแสงหรือส่วนขับมอเตอร์ผิด
แต่ถ้าหยุดนิ่งแล้วทดสอบโดยการนำวัตถุค่อย ๆ ขยับเข้าหาด้านหน้าของตัวหุ่นยนต์ เมื่อเข้าไปใกล้ถึงจุด ๆ หนึ่งหุ่นยนต์จะถอยหลังทันที
เมื่อเราขยับวัตถุไปทางด้านซ้ายหรือทางด้านขวาหุ่นยนต์เราจะต้องคอยตามวัตถุเสมอ หรือลองใช้มือแทนวัตถุมาบังแสงอินฟราเรดทั้ง 2 ข้าง จะทำให้หุ่นยนต์เดินถอยหลังดังในรูปที่ 13
แต่ถ้าหุ่นยนต์ที่เราสร้างขึ้นไม่ขยับไปตามหลักการ ให้ค่อย ๆ พิจารณาทีละส่วนจากภาคส่งอินฟราเรด ภาครับแสงอินฟราเรด ส่วนที่เป็น OR GATE ส่วนขับมอเตอร์และการเดินสายไฟ ผมขอรับรองว่าต่อวงจรตามรูปที่ให้มาเราจะได้หุ่นยนต์หัวใจที่เคลื่อนไหวได้อย่างแน่นอน ครับ!